Модуль WiFi ESP8266
ESP8266 та його клони - це недорогі та легко доступні модулі Wi-Fi з повним стеком TCP/IP та можливістю мікроконтролера. Вони можуть використовуватись з будь-яким контролером Pixhawk.
ESP8266 - це defacto за замовчуванням WiFi модуль для використання з Pixracer (і, як правило, має вбудований з ним).
Де купити
Модуль ESP8266 легко доступний від ряду постачальників. Нижче наведено перелік кількох виконавців.
Більшість модулів підтримують тільки 3.3 V у той час як деякі контролери польоту (наприклад, Pixhawk 4) вивід на 5V (вам потрібно перевірити сумісність і виконати зниження напруги при необхідності).
Модулі, що приймають постачання 3.3V:
Модулі, що приймають постачання 5.3V:
- AI Thinker (Banggood)
- AlphaUAVLink (Banggood)
Встановлення Pixhawk/PX4 & конфігурації
TIP
Спершу вам може знадобитися оновити радіо з прошивкою ESP8266, сумісною з PX4 (див. нижче). Інструкції по виготовленню повинні пояснити, чи це потрібно.
Підключіть свій ESP8266 до вашого польотного контролера серії Pixhawk (наприклад, Pixracer) на будь-якому вільному UART.
Підключіть контролер польоту до вашої наземної станції через USB (так як WiFi ще не повністю налаштований).
Використання QGroundControl:
- Завантажити останню прошивку PX4 на контролер польоту.
- Налаштувати послідовний порт, який використовується для підключення ESP8266. Не забудьте встановити швидкість передачі даних на 921600, щоб відповідати значенню, встановленому для ESP8266.
- Налаштуйте MAVLink на відповідному послідовному порту для отримання телеметрії та передачі команд через ESP8266.
Після того, як ви налаштували послідовний порт керування польотом для підключення до радіо, ви можете від'єднати фізичне USB-підключення між наземною станцією та транспортним засобом.
Підключення через ESP8266 до QGC
Модуль надає точку доступу WiFi, яку ваш комп'ютер земної станції може використовувати для підключення до літального апарату.
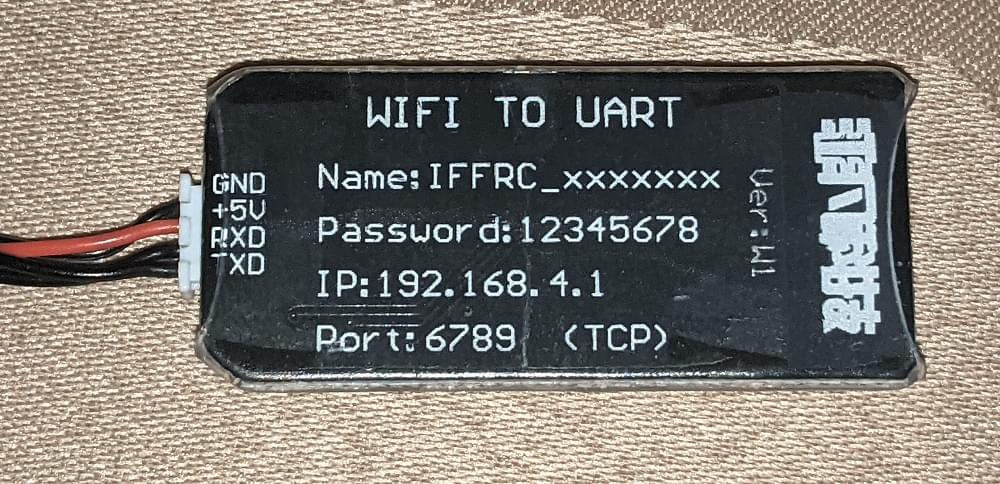
Налаштування точки доступу ESP8266 повинні бути надані разом з платою (наприклад, зазвичай надруковані на зворотному боці плати або на упаковці).
Типові налаштування заводської мережі:
- SSID: PixRacer
- Password: pixracer
- WiFi Channel: 11
- UART speed: 921600
Інші модулі можуть використовувати налаштування, подібні до цього:
- SSID: IFFRC_xxxxxxxx
- Password: 12345678
- IP: 192.168.4.1
- Port: 6789 (TCP)
Приклади дошок від AlphaUILink та DOITING показані нижче:


У Wi-Fi увімкнена QGroundControl основний комп'ютер станцій/планшет, знайдіть і підключіться до відкритої бездротової мережі для ESP8266. На комп'ютері з Windows налаштування підключення до мережі з назвою Pixracer та типовим паролем pixracer будуть виглядати так:
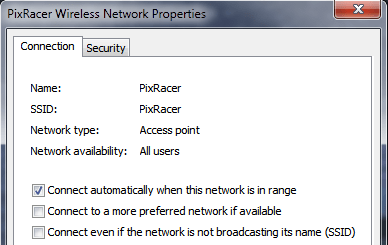
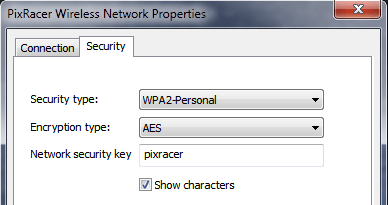
QGroundControl автоматично підключиться до літального апарату, коли комп'ютер наземної станції підключений до точки доступу WiFi з назвою "Pixracer".
Якщо ви використовуєте модуль з будь-яким іншим ім'ям WiFi, вам потрібно вручну налаштувати підключення WiFi QGroundControl, як показано в наступному розділі.
Налаштувати QGC з нестандартними WiFi підключеннями
QGroundControl автоматично підключиться до транспортного засобу, коли комп'ютер наземної станції буде підключений до точки доступу WiFi "Pixracer". Для будь-якого іншого імені точки доступу вам потрібно буде вручну створити спеціальне комунікаційне посилання:
- Перейдіть у Налаштування додатку > Канали зв'язку
- Додайте нове підключення з відповідними налаштуваннями.
- Виберіть нове підключення та натисніть Підключитися.
- Автомобіль тепер повинен підключатися
Перевірити
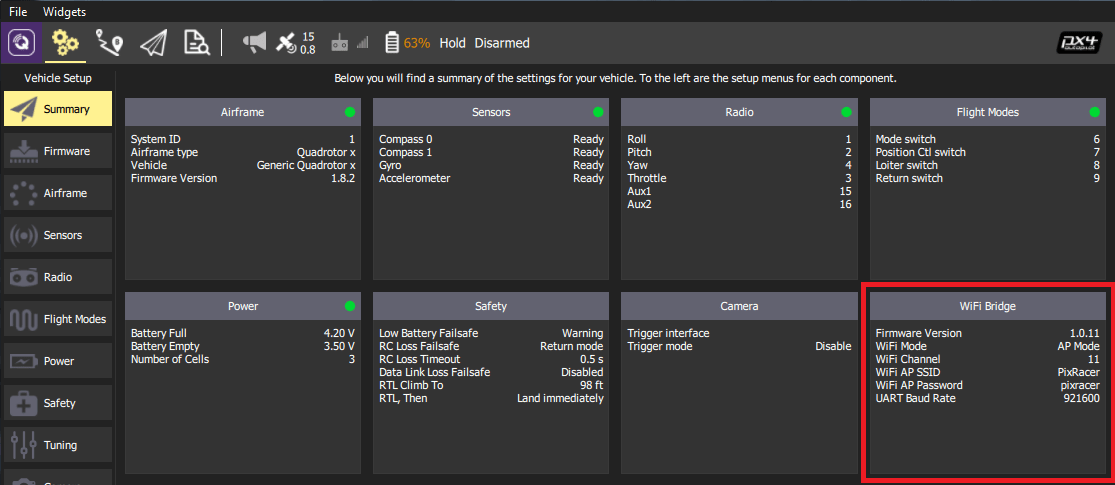
Тепер ви повинні бачити рух HUD на вашому комп'ютері QGC через бездротове з'єднання і мати можливість переглядати панель підсумків для моста WiFi ESP8266 (як показано нижче).
TIP
Якщо у вас виникли проблеми з підключенням, див. Проблеми використання QGC.
Прошивка/прошивка ESP8266 (розширений)
Модулі ESP8266 від різних виробників можуть не мати встановленого відповідного прошивкового забезпечення ESP8266 наперед. Інструкції нижче пояснюють, як налаштувати та запустити тести локально.
Готові бінарні файли
MavLink ESP8266 Firmware V 1.2.2
Побудувати з Джерел
У сховищі прошивки містяться інструкції та всі необхідні інструменти для збирання та прошивки прошивки ESP8266.
Оновлення прошивки OTA
Якщо у вас встановлено мікропрограму 1.0.4 або новішої версії, ви можете виконати оновлення за допомогою функції Over The Air Update ESP. Просто підключіться до його AP WiFi мережі та перейдіть за посиланням: http://192.168.4.1/update. Потім ви можете вибрати файл прошивки, який ви завантажили вище, та завантажити його на модуль WiFi.
TIP
Це найпростіший спосіб оновити прошивку!
Прошивка прошивки ESP8266
Перед прошивкою переконайтеся, що ви завантажили ESP8266 в Режим прошивання, як описано нижче. Якщо ви клонували репозиторій MavESP8266, ви можете зібрати та прошити прошивку, використовуючи надані інструменти та середовище PlatformIO. Якщо ви завантажили заздалегідь побудоване вбудоване програмне забезпечення вище, завантажте утиліту esptool та скористайтеся наведеною нижче командною стрічкою:
sh
esptool.py --baud 921600 --port /dev/your_serial_port write_flash 0x00000 firmware_xxxxx.binДе:
- firmware_xxxxx.bin це прошивка, яку ви завантажили вище
- your_serial_port - це назва серійного порту в якому ESP8266 підключений до (
/dev/cu.usbmodem)
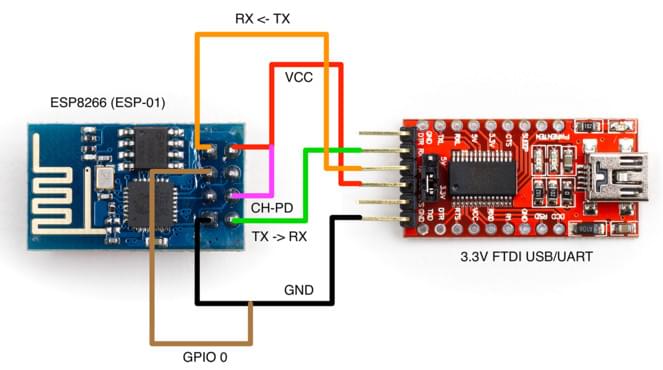
Проводка для Прошивання Програмного Забезпечення
WARNING
Більшість модулів ESP8266 підтримують напругу 3,3 вольти (лише), тоді як деякі контролери польоту (наприклад, Pixhawk 4) видають напругу на рівні 5 В. Перевірте сумісність та знизьте напругу, якщо це потрібно.
Існують різні методи для встановлення ESP8266 у Режим Прошивки, але не всі USB/UART адаптери надають всі необхідні контакти для автоматичного перемикання режиму. Для того щоб завантажити ESP8266 у режимі Flash, пін GPIO-0 повинен бути встановлений у низьке положення (GND), а пін CH_PD повинен бути встановлений у високе положення (VCC). Ось як виглядає моя власна налаштування:
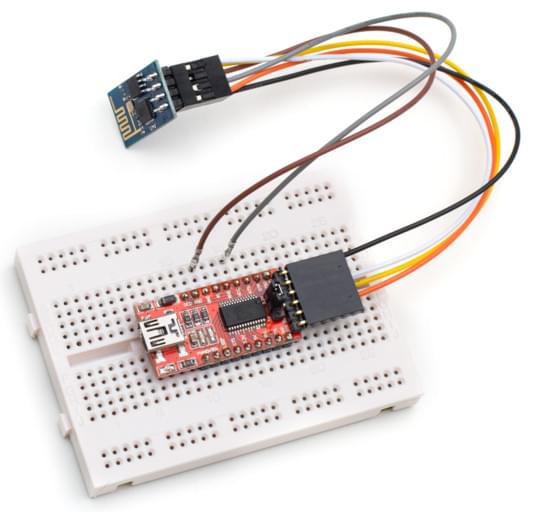
Я побудував кабель, де RX, TX, VCC та GND правильно підключені безпосередньо від адаптера FTDI до ESP8266. З ESP8266 я залишив дві проводи, підключені до GPIO-0 та CH_PD вільними, щоб я міг завантажити його або зазвичай, або в режимі флеш, підключивши їх до GND та VCC відповідно.
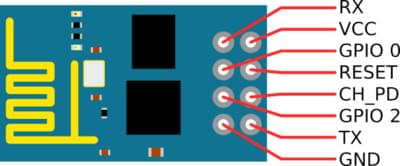
ESP8266 (ESP-01) Pinout
Діаграма миготіння за допомогою адаптера USB/UART FTDI