Режим Acro (фіксоване крило)

'%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:.99607843;stroke:none;stroke-width:1.14113545;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='6.615'%20height='6.615'%20x='.702'%20y='290.285'%20rx='.662'%20ry='.688'/%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:.99607843;stroke:none;stroke-width:.28405154;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='2.706'%20height='1.002'%20x='2.656'%20y='289.851'%20rx='.271'%20ry='.104'/%3e%3cellipse%20style='opacity:1;fill:%23000;fill-opacity:1;stroke:none;stroke-width:2.61286139;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20cx='4.009'%20cy='289.8'%20rx='.334'%20ry='.685'/%3e%3ccircle%20style='opacity:1;fill:%23fff;fill-opacity:1;stroke:none;stroke-width:1.71015;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20cx='2.488'%20cy='292.538'%20r='1.235'/%3e%3ccircle%20style='opacity:1;fill:%23fff;fill-opacity:1;stroke:none;stroke-width:1.71015;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20cx='5.594'%20cy='292.538'%20r='1.235'/%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:1;stroke:none;stroke-width:.28370944;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='.529'%20height='.529'%20x='2.223'%20y='292.273'%20rx='0'%20ry='0'/%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:1;stroke:none;stroke-width:.28370944;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='.529'%20height='.529'%20x='5.33'%20y='292.273'%20rx='0'%20ry='0'/%3e%3c/g%3e%3c/svg%3e "Manual/Remote control required")
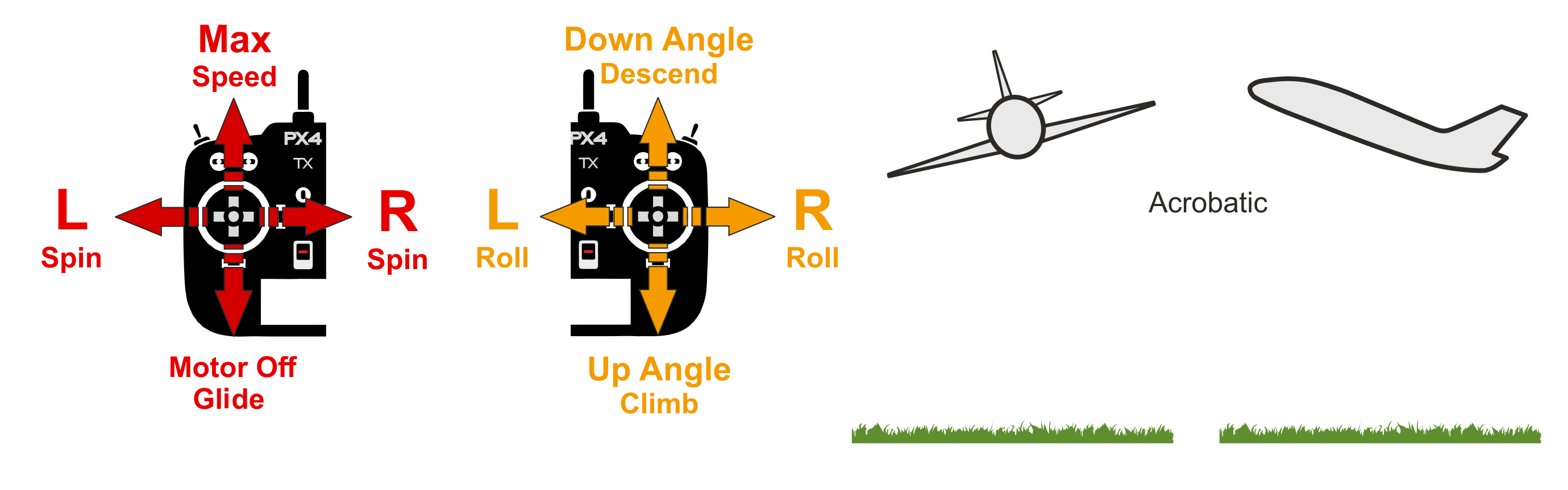
Acro режим - це ручний режим для виконання акробатичних маневрів, наприклад, перекидів, сальто, стійок та акробатичних фігур.
Ручки крена, тангажу та риштування керують швидкістю кутової обертання навколо відповідних вісей, а керування тяги безпосередньо передається до розподілу керування. Коли стіки будуть відцентровані, апарат перестане обертатися, але залишиться у своїй поточній орієнтації (на боці, перевернутий, тощо) і рухатиметься відповідно до свого поточного імпульсу.
Технічний опис
Ручний режим для виконання акробатичних маневрів, наприклад, перекидів, сальто, стійок і акробатичних фігур.
Вхідні сигнали стіків крену-тангажу перетворюються на команди кутової швидкості, які стабілізуються автопілотом. Передача дроселя здійснюється безпосередньо для керування розподілом.
Параметри
| Параметр | Опис |
|---|---|
| FW_ACRO_X_MAX | Максимальна швидкість обертання корпусу x (швидкість обертання корпусу x, яку контролер намагається досягти, якщо користувач вводить ролл-стік в режимі acro). За замовчуванням: 90 градусів. |
| FW_ACRO_Y_MAX | Максимальна швидкість тіла y в режимі acro (максимальна швидкість тіла y, якої намагається досягти контролер, якщо користувач вводить пітч-стик у режимі acro). За замовчуванням: 90 градусів. |
| FW_ACRO_Z_MAX | Максимальна швидкість обертання корпусу z в режимі acro (максимальна швидкість обертання корпусу, якої намагається досягти контролер, якщо користувач вводить стик рискання в режимі acro). За замовчуванням: 45 градусів. |