Марсоходи (UGVs)
WARNING
Підтримка для ровера є експериментальною. Волонтери та контрибютори, внесення нових функцій, нових конфігурацій каркасів або інших вдосконалень дуже вітається!
PX4 підтримує ровери (безпілотні наземні транспортні засоби - UGVs) з керуванням акермана та диференційним.
У цьому розділі містяться журнали збірки/інструкції щодо складання та налаштування ряду UGV фреймів.

Типи Марсоходів
PX4 підтримує рухомі з використанням:
- Диференційне керування: напрямок контролюється шляхом руху лівих і правих коліс з різною швидкістю. Цей вид керування часто використовується на бульдозерах, танках та інших гусеничних транспортних засобах.
- Кермування Акермана: напрямок керування контролюється спрямуванням коліс у напрямку руху (геометрія кермування Акермана компенсує той факт, що колеса на внутрішньому та зовнішньому повороті рухаються з різними швидкостями). Цей вид керування використовується на більшості комерційних транспортних засобів, включаючи автомобілі, вантажівки тощо.
Підтримувані каркаси можна переглянути в Довіднику про планери > Rover(Рухавець).
Як налаштувати Rover
Конфігурація керування Акермана
Налаштування ровера з керуванням Аккермана просте:
У конфігурації Airframe виберіть Загальний наземний транспортний засіб.
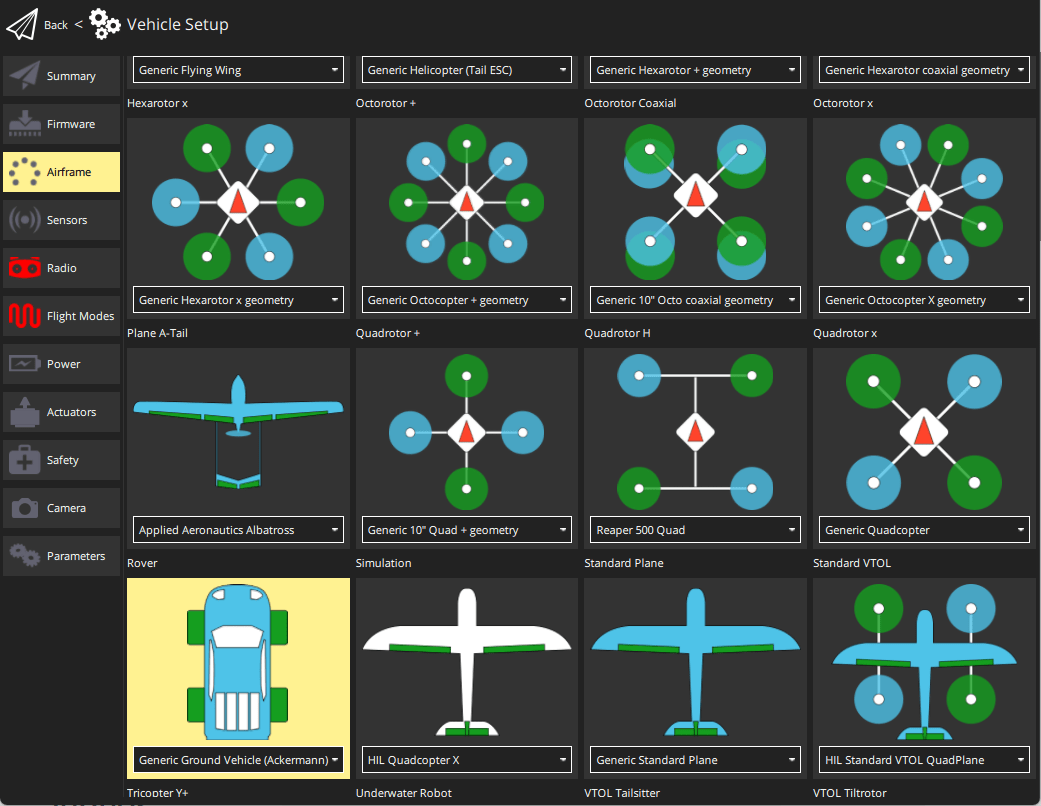
Виберіть кнопку Застосувати та перезапустити.
Відкрийте Конфігурацію та & тестування приводів для відображення функцій керування та регулювання на виходи контролера польоту.
Конфігурація диференційного керування
У конфігурації Airframe виберіть або Aion Robotics R1 UGV, або NXP Cup car: DF Robot GPX
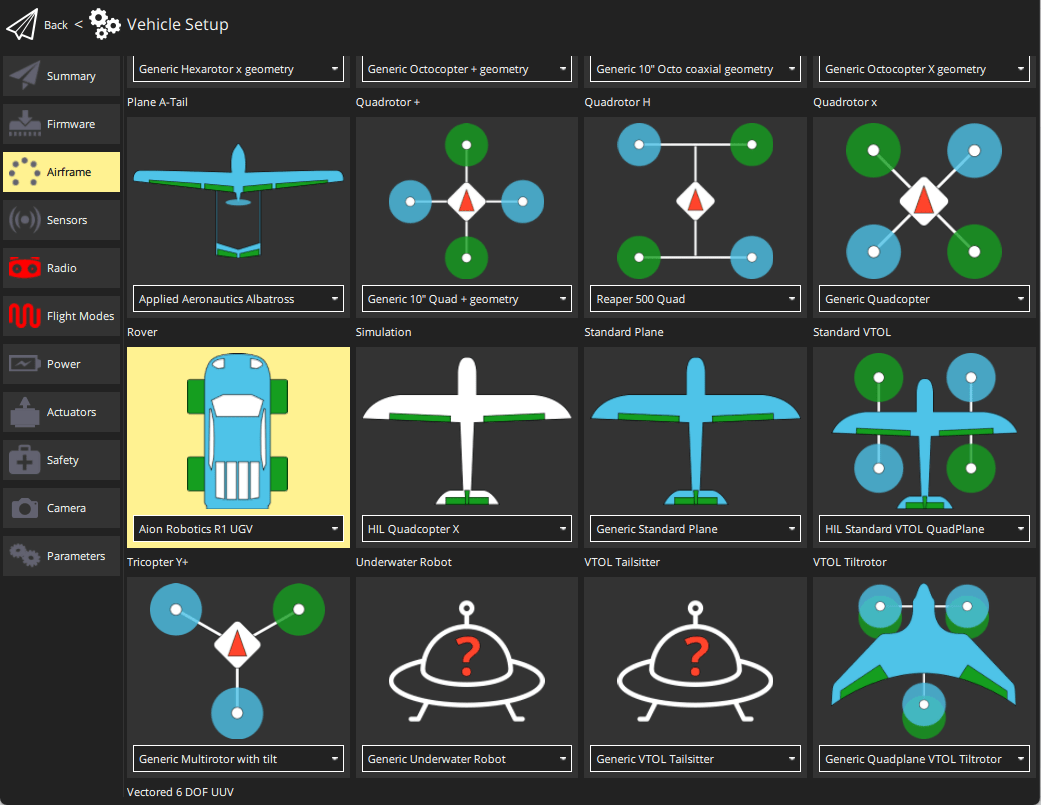
Виберіть кнопку Застосувати та перезапустити.
- Відкрийте Конфігурацію та & тестування приводів та відобразіть функції лівого та правого двигуна на виходи контролера польоту.
Симуляція
Класичний Газебо надає симуляції для обох типів керування:
- Ackermann: акерманський ровер
- Диференціал: роувер r1
Відео
Це відео показує Traxxas Stampede Rover (автомобіль Акермана).