Режим Acro (фіксоване крило)

'%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:.99607843;stroke:none;stroke-width:1.14113545;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='6.615'%20height='6.615'%20x='.702'%20y='290.285'%20rx='.662'%20ry='.688'/%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:.99607843;stroke:none;stroke-width:.28405154;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='2.706'%20height='1.002'%20x='2.656'%20y='289.851'%20rx='.271'%20ry='.104'/%3e%3cellipse%20style='opacity:1;fill:%23000;fill-opacity:1;stroke:none;stroke-width:2.61286139;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20cx='4.009'%20cy='289.8'%20rx='.334'%20ry='.685'/%3e%3ccircle%20style='opacity:1;fill:%23fff;fill-opacity:1;stroke:none;stroke-width:1.71015;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20cx='2.488'%20cy='292.538'%20r='1.235'/%3e%3ccircle%20style='opacity:1;fill:%23fff;fill-opacity:1;stroke:none;stroke-width:1.71015;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20cx='5.594'%20cy='292.538'%20r='1.235'/%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:1;stroke:none;stroke-width:.28370944;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='.529'%20height='.529'%20x='2.223'%20y='292.273'%20rx='0'%20ry='0'/%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:1;stroke:none;stroke-width:.28370944;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='.529'%20height='.529'%20x='5.33'%20y='292.273'%20rx='0'%20ry='0'/%3e%3c/g%3e%3c/svg%3e "Manual/Remote control required")
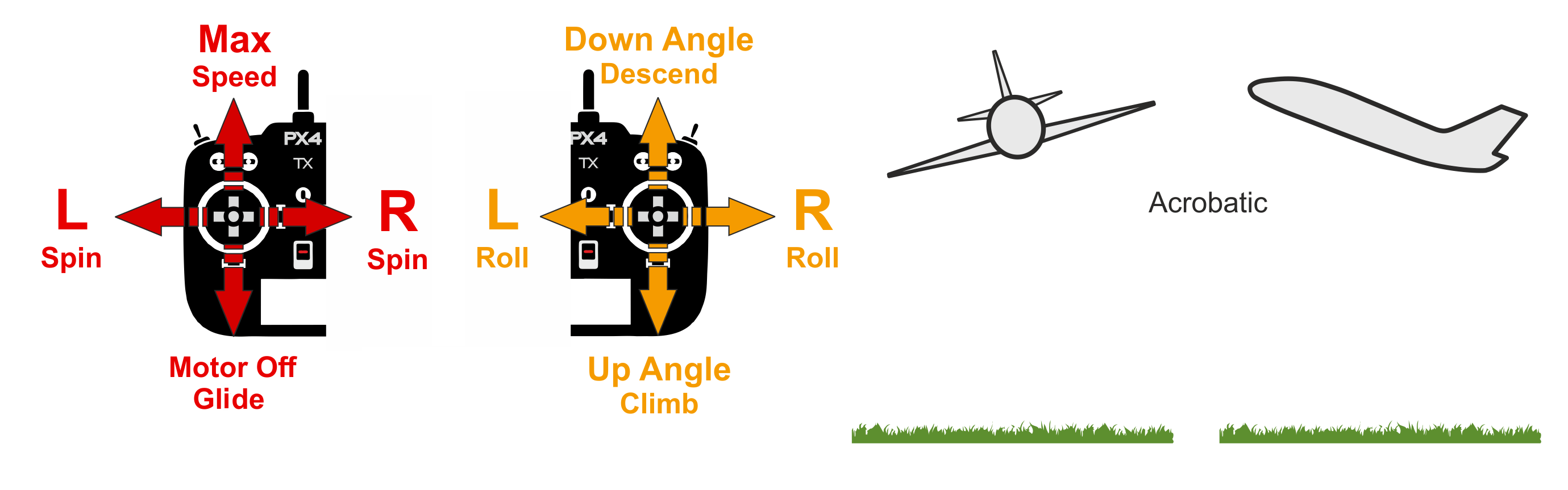
Acro mode is the manual mode for performing acrobatic maneuvers e.g. rolls, flips, stalls and acrobatic figures.
Ручки крена, тангажу та риштування керують швидкістю кутової обертання навколо відповідних вісей, а керування тяги безпосередньо передається до розподілу керування. Коли стіки будуть відцентровані, апарат перестане обертатися, але залишиться у своїй поточній орієнтації (на боці, перевернутий, тощо) і рухатиметься відповідно до свого поточного імпульсу.
Технічний опис
Ручний режим для виконання акробатичних маневрів, наприклад, перекидів, сальто, стійок і акробатичних фігур.
Вхідні сигнали стіків крену-тангажу перетворюються на команди кутової швидкості, які стабілізуються автопілотом. Передача дроселя здійснюється безпосередньо для керування розподілом.
Параметри
| Parameter | Опис |
|---|---|
| FW_ACRO_X_MAX | Максимальна швидкість обертання корпусу x (швидкість обертання корпусу x, яку контролер намагається досягти, якщо користувач вводить ролл-стік в режимі acro). За замовчуванням: 90 градусів. |
| FW_ACRO_Y_MAX | Максимальна швидкість тіла y в режимі acro (максимальна швидкість тіла y, якої намагається досягти контролер, якщо користувач вводить пітч-стик у режимі acro). За замовчуванням: 90 градусів. |
| FW_ACRO_Z_MAX | Максимальна швидкість обертання корпусу z в режимі acro (максимальна швидкість обертання корпусу, якої намагається досягти контролер, якщо користувач вводить стик рискання в режимі acro). За замовчуванням: 45 градусів. |
| FW_ACRO_YAW_EN | Enable yaw rate controller (if disabled the pilot commands directly the yaw actuator). 0: Disabled (Default), 1: Enabled. |