mRo Pixracer
WARNING
PX4 не розробляє цей (або будь-який інший) автопілот. Contact the manufacturer for hardware support or compliance issues.
Сімейство плат Pixhawk® XRacer оптимізоване для малих гоночних квадрокоптерів та літаків. In contrast to Pixfalcon and Pixhawk it has in-built WiFi, new sensors, convenient full servo headers, CAN and supports 2M flash.

TIP
This autopilot is supported by the PX4 maintenance and test teams.
Основні характеристики
- Main System-on-Chip: STM32F427VIT6 rev.3
- CPU: 180 МГц ARM Cortex® M4 з одноточним FPU
- RAM: 256 KB SRAM (L1)
- Стандартний FPV form factor: 36x36 mm зі стандартним 30.5 mm hole pattern
- Invensense® ICM-20608 Accel / Gyro (4 KHz) / MPU9250 Accel / Gyro / Mag (4 KHz)
- Магнітометр HMC5983 з компенсацією температури
- Measurement Specialties MS5611 барометр
- JST GH конектори
- microSD (логування)
- Futaba S.BUS і S.BUS2 / Spektrum DSM2 і DSMX / Graupner SUMD / PPM input / Yuneec ST24
- FrSky® порт телеметрії
- OneShot PWM (налаштовується)
- Опціонально: запобіжний перемикач та базер
Where to Buy
Pixracer Pro is available from the store.3dr.com.
Аксесуари в комплекті:
- Digital airspeed sensor
- Hobbyking® OSD + EU Telemetry (433 MHz) (Discontinued)
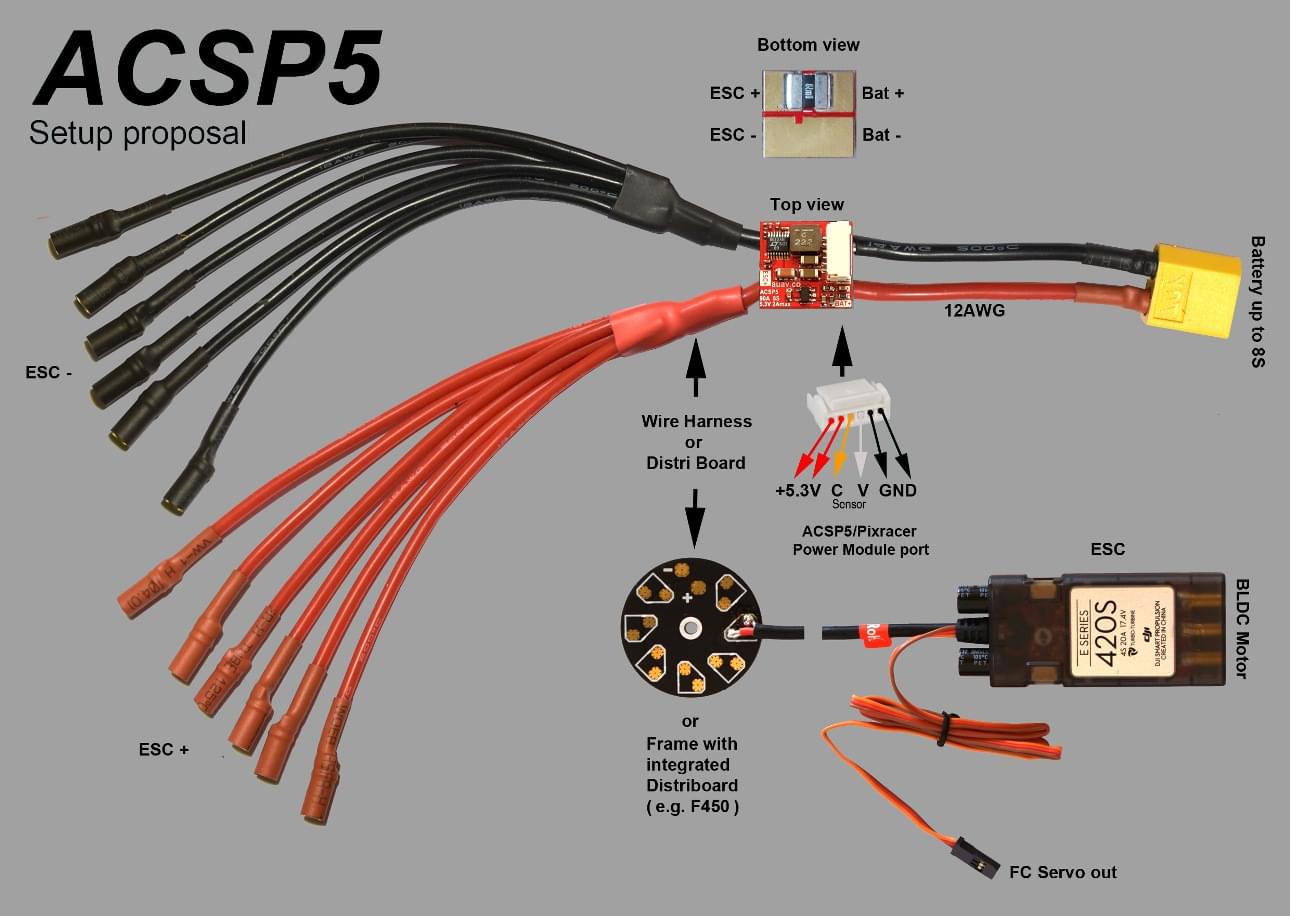
Набір
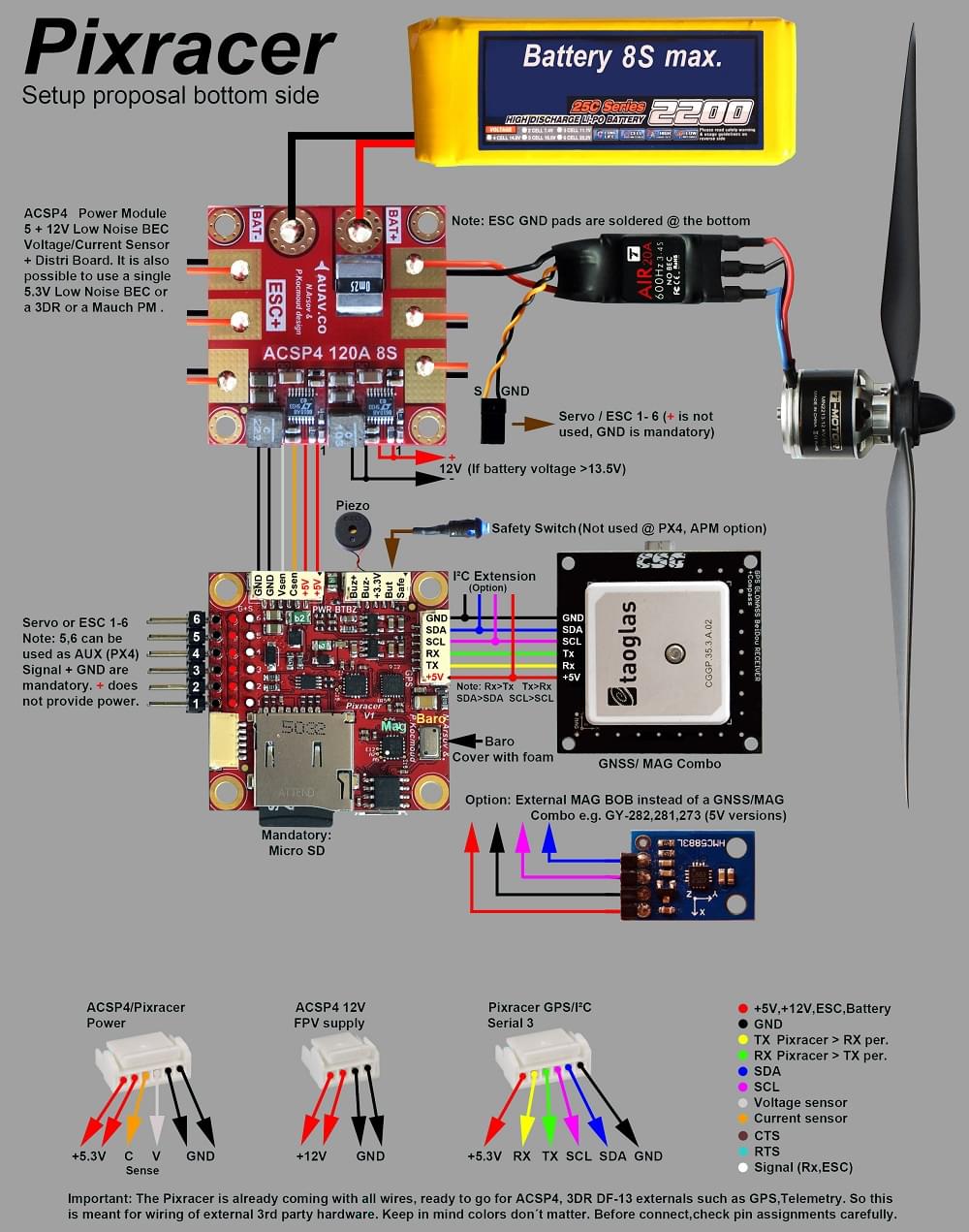
Pixracer розроблений для використання окремого джерела живлення авіоніки. Це необхідно для того, щоб уникнути стрибків струму від моторів чи ESC, що повертається до політного контролера і турбує його чутливі сенсори.
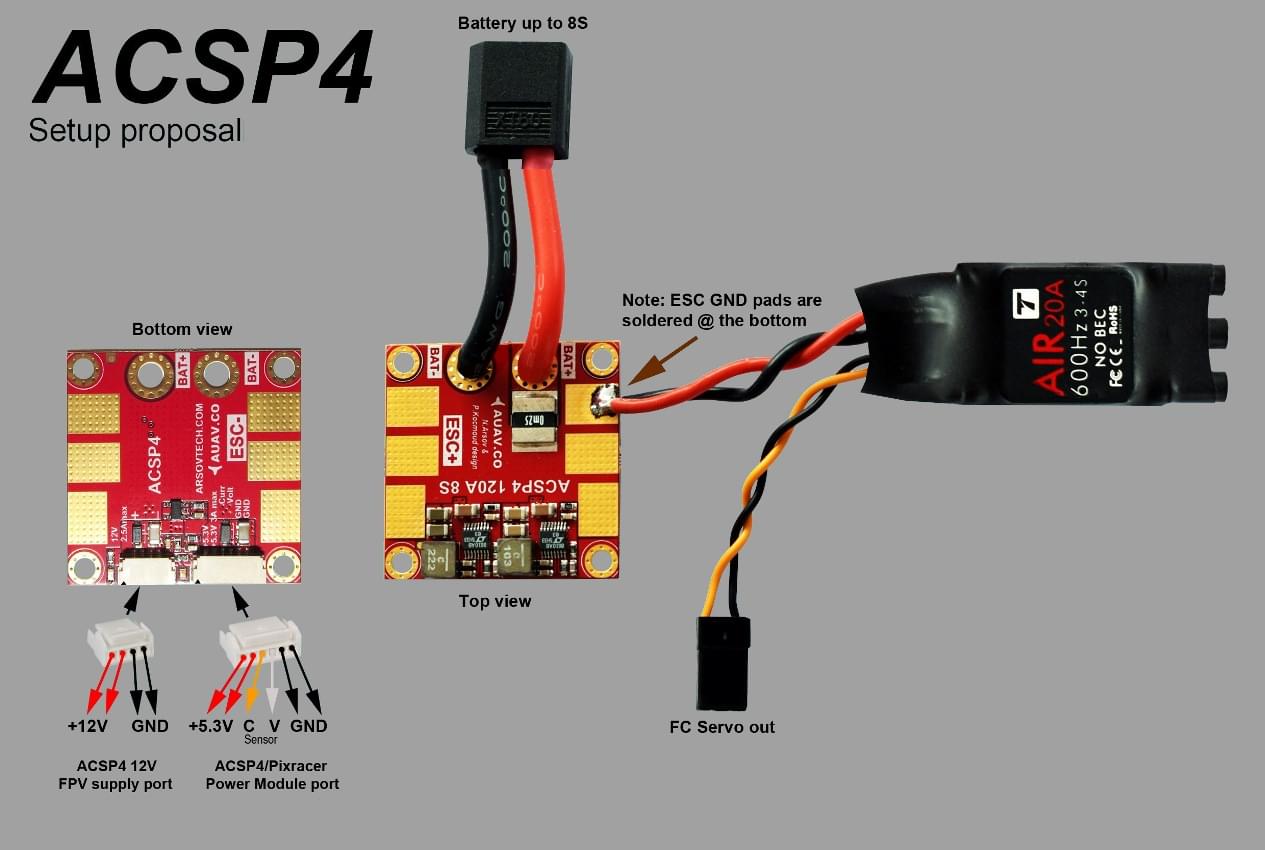
- Модуль живлення (з вимірюванням напруги та струму)
- Розгалужувач I2C (підтримка AUAV, Hobbyking та 3DR® периферійних пристроїв)
- Набір кабелів для всіх поширених периферійних пристроїв
Wifi (без необхідності USB)
Одна з головних особливостей плати - це її можливість використовувати Wifi для прошивки, налаштування системи та телеметрії в польоті. Це звільняє його від потреби будь-якої десктопної системи.
INFO
Firmware upgrade is not yet enabled over WiFi (it is supported by the default bootloader but not yet enabled). Підтримуються налаштування та телеметрія.
Збірка
See the Pixracer Wiring Quickstart
Схеми з'єднань
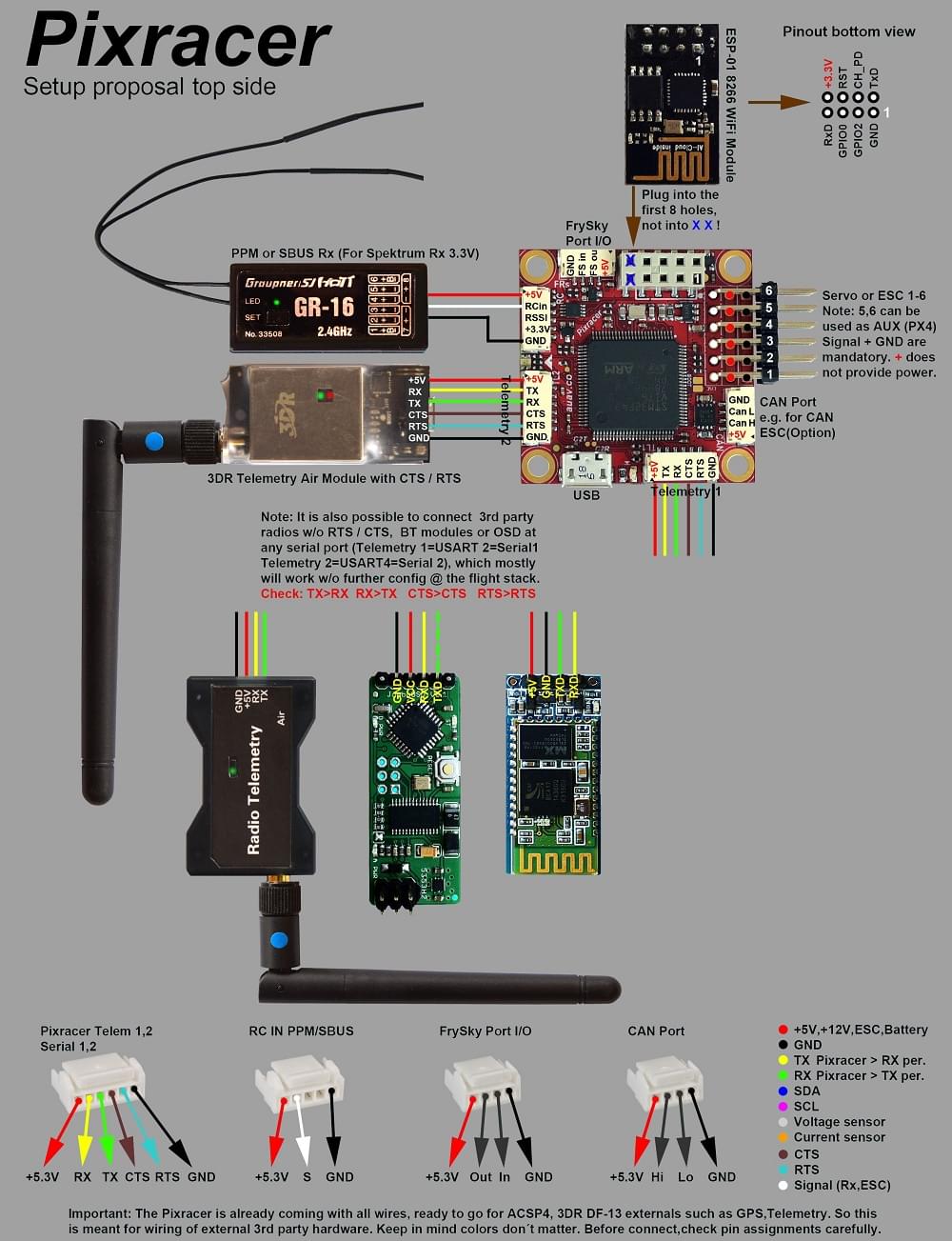
INFO
If using TELEM2 for an external telemetry module you will need to configure it as a MAVLink serial port. For more information see: Pixracer Wiring Quickstart > External Telemetry

З’єднання
All connectors follow the Pixhawk connector standard. Якщо не вказано інше, всі конектори - це JST GH.
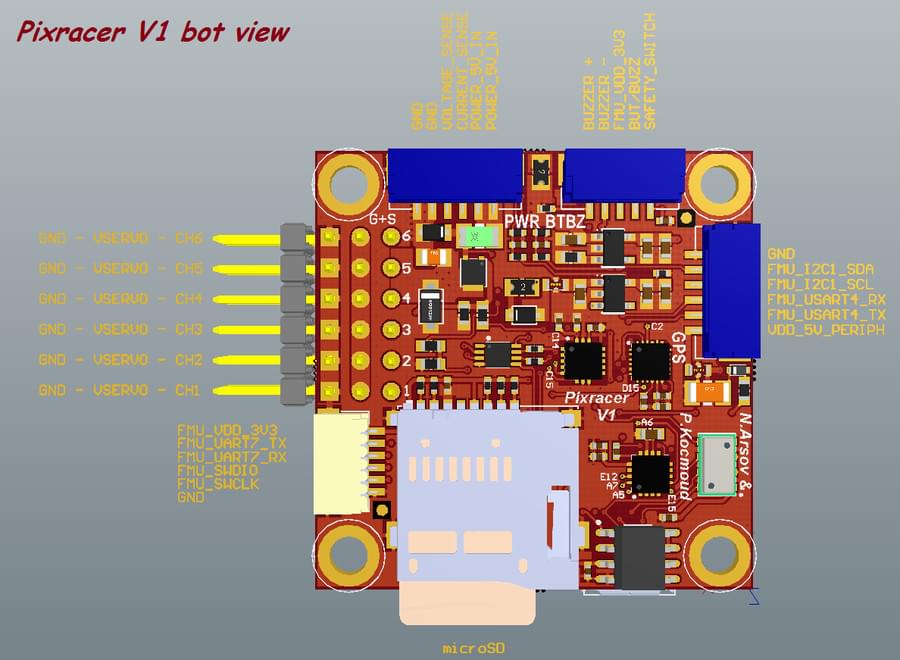
Схема розташування виводів
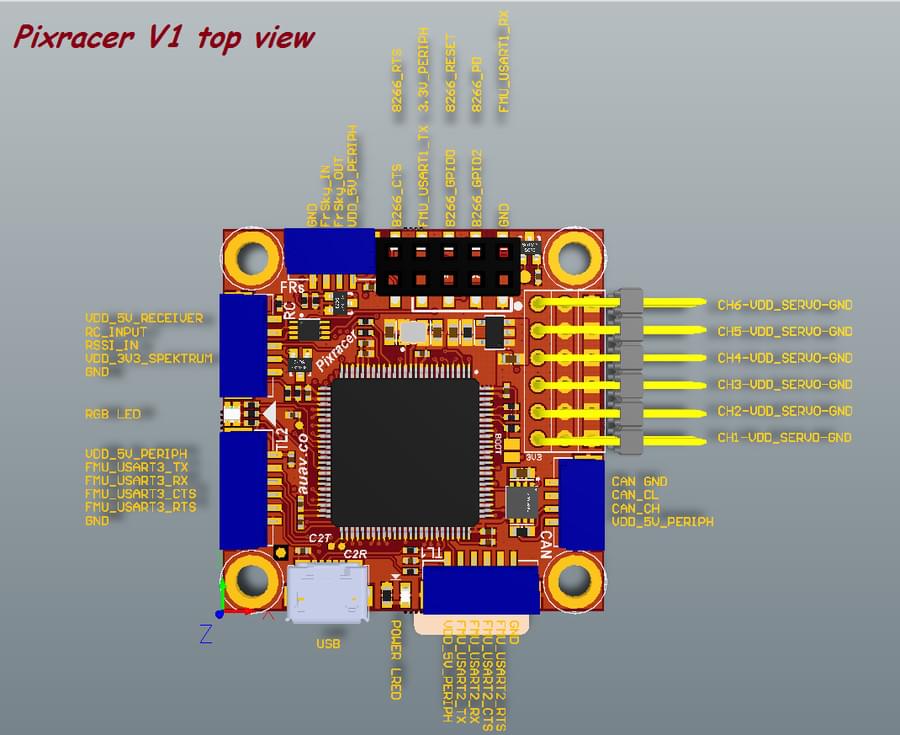
TELEM1, TELEM2+OSD порти
| Pin | Сигнал | Вольтаж |
|---|---|---|
| 1 (red) | VCC | +5V |
| 2 (blk) | TX (OUT) | +3.3V |
| 3 (blk) | RX (IN) | +3.3V |
| 4 (blk) | CTS (IN) | +3.3V |
| 5 (blk) | RTS (OUT) | +3.3V |
| 6 (blk) | GND | GND |
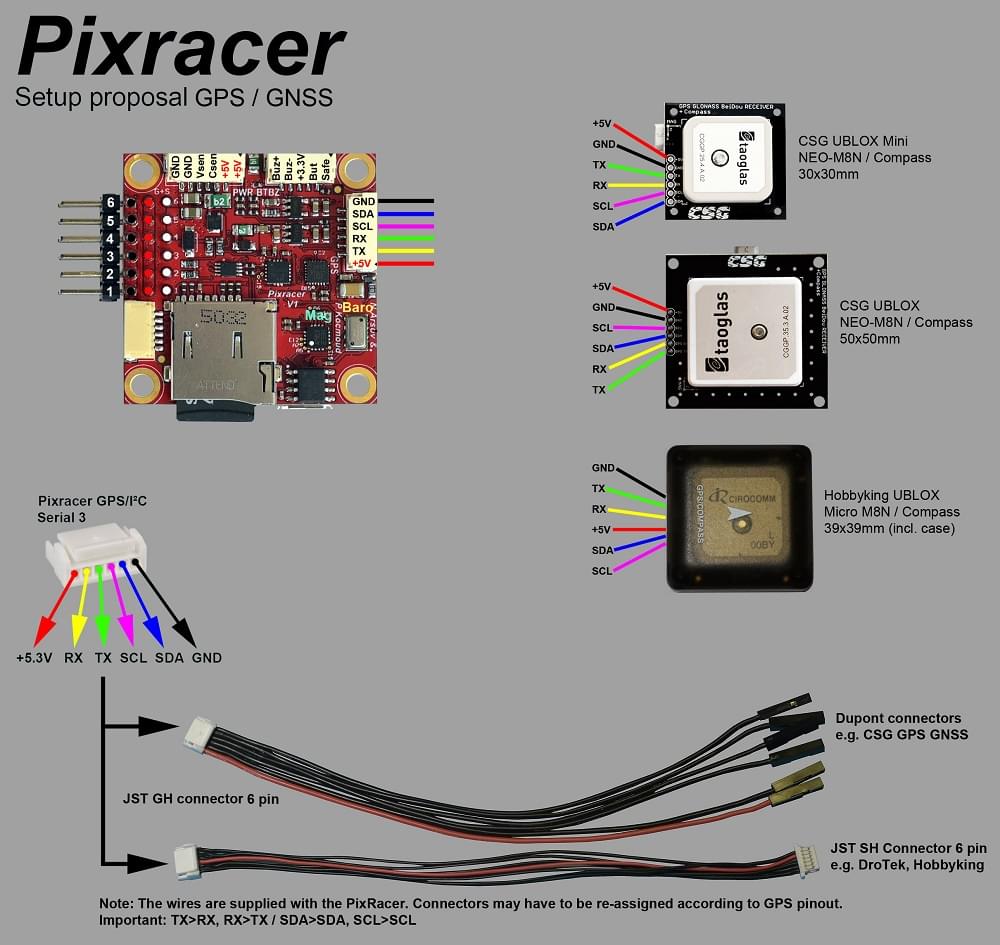
Порт GPS
| Pin | Сигнал | Вольтаж |
|---|---|---|
| 1 (red) | VCC | +5V |
| 2 (blk) | TX (OUT) | +3.3V |
| 3 (blk) | RX (IN) | +3.3V |
| 4 (blk) | I2C1 SCL | +3.3V |
| 5 (blk) | I2C1 SDA | +3.3V |
| 6 (blk) | GND | GND |
Телеметрія FrSky / SERIAL4
| Pin | Сигнал | Вольтаж |
|---|---|---|
| 1 (red) | VCC | +5V |
| 2 (blk) | TX (OUT) | +3.3V |
| 3 (blk) | RX (IN) | +3.3V |
| 4 (blk) | GND | GND |
RC вхід (приймає PPM / S.BUS / Spektrum / SUMD / ST24)
| Pin | Сигнал | Вольтаж |
|---|---|---|
| 1 (red) | VCC | +5V |
| 2 (blk) | RC IN | +3.3V |
| 3 (blk) | RSSI IN | +3.3V |
| 4 (blk) | VDD 3V3 | +3.3V |
| 5 (blk) | GND | GND |
CAN
| Pin | Сигнал | Вольтаж |
|---|---|---|
| 1 (red) | VCC | +5V |
| 2 (blk) | CAN_H | +12V |
| 3 (blk) | CAN_L | +12V |
| 4 (blk) | GND | GND |
POWER
| Pin | Сигнал | Вольтаж |
|---|---|---|
| 1 (red) | VCC | +5V |
| 2 (blk) | VCC | +5V |
| 3 (blk) | CURRENT | +3.3V |
| 4 (blk) | VOLTAGE | +3.3V |
| 5 (blk) | GND | GND |
| 6 (blk) | GND | GND |
SWITCH
| Pin | Сигнал | Вольтаж |
|---|---|---|
| 1 (red) | SAFETY | GND |
| 2 (blk) | !IO_LED_SAFETY | GND |
| 3 (blk) | VCC | +3.3V |
| 4 (blk) | BUZZER- | - |
| 5 (blk) | BUZZER+ | - |
Відладочний порт
The pinouts and connector comply with the Pixhawk Debug Mini interface defined in the Pixhawk Connector Standard (JST SM06B connector).
| Pin | Сигнал | Вольтаж |
|---|---|---|
| 1 (red) | VCC TARGET SHIFT | +3.3V |
| 2 (blk) | CONSOLE TX (OUT) | +3.3V |
| 3 (blk) | CONSOLE RX (IN) | +3.3V |
| 4 (blk) | SWDIO | +3.3V |
| 5 (blk) | SWCLK | +3.3V |
| 6 (blk) | GND | GND |
Інформацію про використання цього порту див:
- SWD Debug Port
- PX4 System Console (Note, the FMU console maps to UART7).
Налаштування послідовного порту
| UART | Пристрій | Порт |
|---|---|---|
| UART1 | /dev/ttyS0 | WiFi (ESP8266) |
| USART2 | /dev/ttyS1 | TELEM1 (керування потоком) |
| USART3 | /dev/ttyS2 | TELEM2 (керування потоком) |
| UART4 | ||
| UART7 | CONSOLE | |
| UART8 | SERIAL4 |
Креслення
The reference is provided as: Altium Design Files
The following PDF files are provided for convenience only:
- pixracer-rc12-12-06-2015-1330.pdf
- pixracer-r14.pdf - R14 or RC14 is printed next to the SDCard socket
Збірка прошивки
TIP
Most users will not need to build this firmware! It is pre-built and automatically installed by QGroundControl when appropriate hardware is connected.
To build PX4 for this target:
make px4_fmu-v4_defaultНалаштування
Compass calibration should be done with USB disconnected. Це завжди рекомендується, але необхідно на Pixracer, оскільки підключення USB виробляє особливо великі рівні магнітного перешкодження.
Конфігурація в інших випадках така ж, як для інших плат.
Автори
Цей дизайн був створений Nick Arsov і Phillip Kocmoud і архітектурно запроєктований Lorenz Meier, David Sidrane і Leonard Hall.