Контролер польоту CubePilot Cube Yellow
WARNING
PX4 не розробляє цей (або будь-який інший) автопілот. Contact the manufacturer for hardware support or compliance issues.
Контролер польоту Cube Yellow - це гнучкий автопілот, призначений в першу чергу для виробників комерційних систем.

Контролер призначений для використання зі специфічною для домену несучою платою, щоб зменшити кількість дротів, підвищити надійність і спростити збірку. For example, a carrier board for a commercial inspection vehicle might include connections for a companion computer, while a carrier board for a racer could include ESCs for the frame of the vehicle.
Cube має віброізоляцію на двох IMU, з третім фіксованим IMU в якості еталонного/резервного.
TIP
The manufacturer Cube User Guide contains detailed information, including an overview of the Differences between Cube Colours.
INFO
This flight controller is manufacturer supported.
Основні характеристики
- 32bit STM32F777VI (32bit ARM Cortex M7, 400 MHz, Flash 2MB, RAM 512 KB).
- 32 bit STM32F103 failsafe co-processor
- 14 ШІМ / серво виходів (8 з відмовостійкими і ручним керуванням, 6 допоміжних, сумісних з великими потужностями)
- Широкі можливості підключення додаткових периферійних пристроїв (UART, I2C, CAN)
- Інтегрована система резервного копіювання для відновлення в польоті та ручного керування з виділеним процесором та автономним джерелом живлення (для літаків з фіксованим крилом)
- Резервна система інтегрує систему мікшування, забезпечуючи узгоджені режими автопілота та ручного заміщення ( для літаків з фіксованим крилом)
- Резервні входи живлення та автоматичне перемикання на резервне джерело
- Зовнішній запобіжний вимикач
- Головний візуальний індикатор - багатоколірний світлодіод
- Потужний багатотональний п'єзозвуковий індикатор
- Карта microSD для високошвидкісної фіксації даних протягом тривалого періоду часу
Where to Buy
Збірка
Характеристики
- Processor:
- STM32F777VI (32bit ARM Cortex M7)
- 400 МГц
- 512 KB RAM
- 2 MB Flash
- Failsafe co-processor:
- STM32F100 (32bit ARM Cortex-M3)
- 24 МГц
- 8 KB SRAM
- Sensors: (all connected via SPI)
- Accelerometer: (3) ICM20948, ICM20649, ICM20602
- Gyroscope: (3) ICM20948, ICM20649, ICM20602
- Compass: (1) ICM20948
- Barometric Pressure Sensor: (2) MS5611
- Operating Conditions:
- Operating Temp: -10C to 55C
- IP rating/Waterproofing: Not waterproof
- Servo rail input voltage: 3.3V / 5V
- USB port input:
- Напруга: 4В - 5.7В
- Номінальний струм: 250 мА
- POWER:
- Вхідна напруга: 4.1В - 5.7В
- Номінальний вхідний струм: 2,5 А
- Номінальна вхідна/вихідна потужність: 14 Вт
- Dimensions:
- Cube: 38.25mm x 38.25mm x 22.3mm
- Carrier: 94.5mm x 44.3mm x 17.3mm
- Interfaces
- Порти вводу-виводу: 14 ШІМ-виходів сервоприводів (8 від IO, 6 від FMU)
- 5x UART (послідовні порти), один високої потужності, 2x з контролем потоку ГВП
- 2x CAN (один з внутрішнім 3.3В трансивером, один на конекторі розширювача)
- R/C inputs:
- Spektrum DSM / DSM2 / DSM-X® Satellite сумісний вхід
- Futaba S.BUS® сумісний вхід і вивід
- Вхід сигналу PPM-SUM
- Вхід RSSI (ШІМ або напруга)
- I2C
- SPI
- 3.3В АЦП вхід
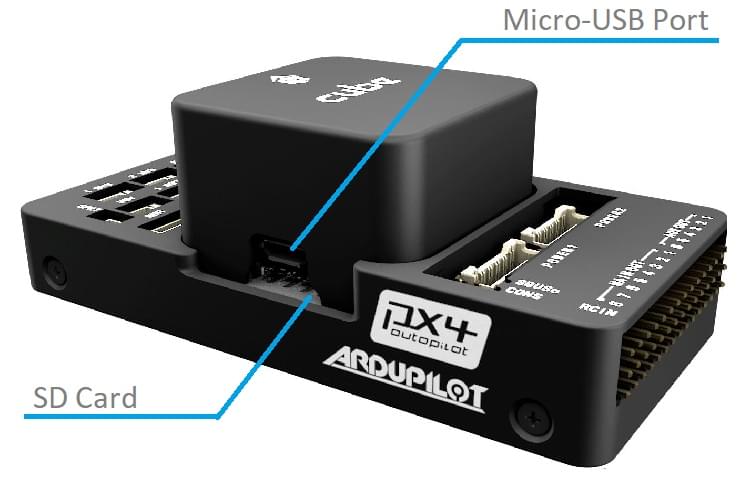
- Внутрішній порт microUSB і розширення зовнішнього порту microUSB
Розпіновки та схеми
Board schematics and other documentation can be found here: The Cube Project.
Порти
Верхня частина (GPS, TELEM тощо)
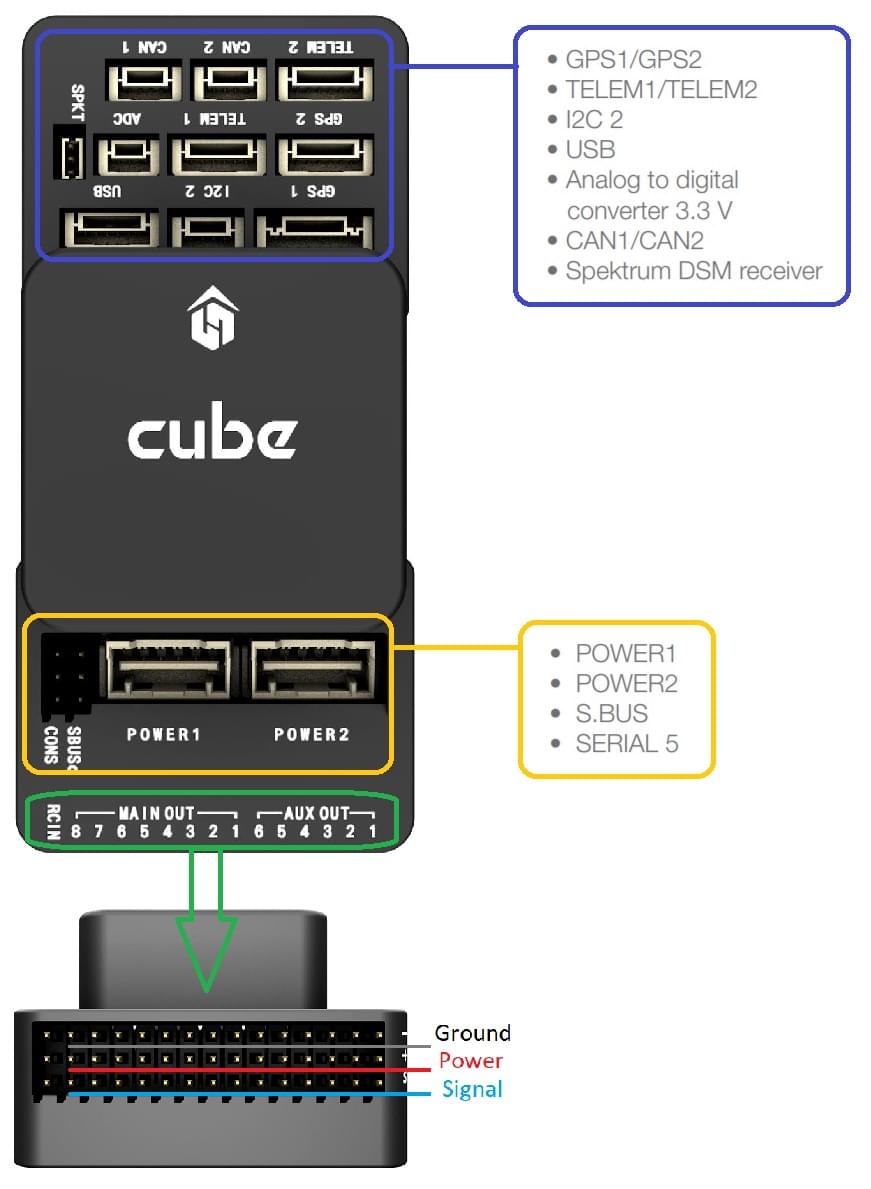
Налаштування послідовного порту
| UART | Пристрій | Порт |
|---|---|---|
| USART2 | /dev/ttyS0 | TELEM1 (керування потоком) |
| USART3 | /dev/ttyS1 | TELEM2 (керування потоком) |
| UART4 | /dev/ttyS2 | GPS1 |
| USART6 | /dev/ttyS3 | PX4IO |
| UART7 | /dev/ttyS4 | CONSOLE/ADSB-IN |
| UART8 | /dev/ttyS5 | GPS2 |
Відладочні порти

Порти USB/SDCard
Збірка прошивки
TIP
Most users will not need to build this firmware! It is pre-built and automatically installed by QGroundControl when appropriate hardware is connected.
To build PX4 for this target:
make cubepilot_cubeyellowПроблеми
Розташування символів CAN1 і CAN2 на кубі перевернуте (CAN1 - це CAN2 і навпаки).
Додаткова інформація/документація
- Cube Wiring Quickstart
- Cube Docs (виробник):