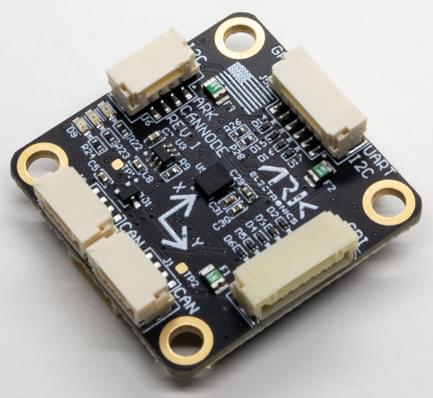
ARK CANnode
ARK CANnode is an open source generic DroneCAN node that includes a 6 degree of freedom IMU. Його основна мета - дозволити використання датчиків, що не є CAN (I2C, SPI, UART) на шині CAN. Також він має виходи PWM для розширення вихідних сигналів транспортного засобу за кількістю та фізичною відстанню.
Де купити
Замовте цей модуль з:
- ARK Electronics (US)
Характеристики обладнання
- Open Source Schematic and BOM
- Датчики
- Bosch BMI088 6-Axis IMU або Invensense ICM-42688-P 6-Axis IMU
- STM32F412CGU6 MCU
- 1MB Flash
- Два роз'єми стандарту CAN для Pixhawk
- 4-контактний JST-GH
- Роз'єм для налагодження стандарту Pixhawk I2C
- 4-контактний JST-GH
- Стандартний коннектор UART/I2C для Pixhawk (Основний порт GPS)
- 6-контактний JST-GH
- Роз'єм стандарту SPI для Pixhawk
- 7-контактний JST-GH
- Коннектор PWM
- 10 Pin JST
- 8 PWM виводів
- Відповідно до схеми підключення штирьових роз'ємів Pixhawk 4 PWM
- Роз'єм для налагодження стандарту Pixhawk
- 6-контактний JST-GH
- Малий форм-фактор
- 3см x 3см x 1.3см
- LED індикатори
- USA Built
- Вимоги до живлення
- 5V
- Сила струму залежить від підключених пристроїв
Налаштування програмного забезпечення
Підключення
ARK CANnode підключений до шини CAN за допомогою стандартного кабелю JST GH з чотирма контактами Pixhawk. For more information, refer to the CAN Wiring instructions.
Налаштування прошивки
ARK CANnode runs the PX4 DroneCAN Firmware. As such, it supports firmware update over the CAN bus and dynamic node allocation.
ARK CANnode boards ship with recent firmware pre-installed, but if you want to build and flash the latest firmware yourself see PX4 DroneCAN Firmware > Building the Firmware.
- Firmware target:
ark_cannode_default - Bootloader target:
ark_cannode_canbootloader
Налаштування режиму польоту
Увімкнути DroneCAN
In order to use the ARK CANnode board, connect it to the Pixhawk CAN bus and enable the DroneCAN driver by setting parameter UAVCAN_ENABLE to 2 for dynamic node allocation (or 3 if using DroneCAN ESCs).
Кроки наступні:
- In QGroundControl set the parameter UAVCAN_ENABLE to
2or3and reboot (see Finding/Updating Parameters). - Підключіть ARK CANnode CAN до Pixhawk CAN.
Після активації модуль буде виявлено при завантаженні.
DroneCAN configuration in PX4 is explained in more detail in DroneCAN > Enabling DroneCAN.
Увімкнення датчику
Вам потрібно буде увімкнути підписника, відповідного для кожного з сенсорів, які підключені до ARK CANnode.
This is done using the parameters named like UAVCAN_SUB_* in the parameter reference (such as UAVCAN_SUB_ASPD, UAVCAN_SUB_BARO etc.).
Конфігурування CANNode Ark
На ARK CANnode вам може знадобитися налаштувати наступні параметри:
| Parameter | Опис |
|---|---|
| CANNODE_NODE_ID | CAN node ID (0 for dynamic allocation). If set to 0 (default), dynamic node allocation is used. Set to 1-127 to use a static node ID. |
| CANNODE_TERM | Вбудована завершення шини CAN. |
Значення LED індикаторів
- Blinking green is normal operation
- Rapid blinking blue and red is firmware update
Якщо ви бачите червоний світлодіод, це означає, що виникла помилка, і вам слід перевірити наступне:
- Переконайтеся, що у польотному контролері встановлено SD-картку.
- Make sure the ARK CANnode has
ark_cannode_canbootloaderinstalled prior to flashingark_cannode_default. - Видаліть бінарні файли з кореневих та ufw директорій SD-карти та спробуйте зібрати та знову прошити.
Дивіться також
- ARK CANnode Documentation (ARK Docs)