CUAV Pixhawk V6X
WARNING
PX4 не розробляє цей (або будь-який інший) автопілот. Contact the manufacturer for hardware support or compliance issues.
Pixhawk V6X® is the latest update to the successful family of Pixhawk® flight controllers designed and made in collaboration with CUAV® and the PX4 team.
It is based on the Pixhawk® Autopilot FMUv6X Standard, Autopilot Bus Standard, and Connector Standard.

TIP
This autopilot is supported by the PX4 maintenance and test teams.
Pixhawk® V6X принесе вам найвищий рівень продуктивності, стабільності та надійності у всіх аспектах.
- Процесор Arm® Cortex®-M7 (STM32H753) з операційною точкою (FPU), високошвидкісні операції на частоті 480 МГц та 2 МБ флеш-пам'яті. Розробники можуть бути більш продуктивними та ефективними, що дозволяє використовувати складніші алгоритми та моделі.
- Високопродуктивний бортовий, низькозвуковий ІНС та автомобільний магнітний компас на основі відкритого стандарту FMUv6X. Мета полягає в досягненні кращої стабільності та антиінтерференційної здатності.
- Triple redundant IMU & double redundant barometer on separate buses. Коли автопілот PX4 виявляє відмову датчика, система безперервно переключається на інший, щоб забезпечити надійність керування польотом.
- Кожен незалежний LDO живить кожен набір сенсорів з незалежним керуванням живленням. Система віброізоляції для фільтрації високочастотної вібрації та зменшення шуму для забезпечення точних показань, що дозволяє транспортним засобам досягати кращих загальних характеристик польоту.
- Зовнішня шина датчика (SPI5) має дві лінії вибору мікросхем та сигнали готовності даних для додаткових датчиків та навантаження з інтерфейсом SPI.
- Інтегрований мікросхемний Ethernet PHY для високошвидкісного зв'язку по Ethernet з пристроями на борту, такими як комп'ютери місій.
- Нова система ізоляції вібрацій, призначена для фільтрації високочастотних вібрацій та зменшення шуму для забезпечення точних вимірювань.
- IMUs are temperature-controlled by onboard heating resistors, allowing optimum working temperature of IMUs
- Modular flight controller: separated IMU, FMU, and Base system connected by a 100-pin & a 50-pin Pixhawk® Autopilot Bus connector.
Pixhawk® V6X ідеально підходить для корпоративних дослідницьких лабораторій, академічних досліджень та комерційних застосувань.
Processors & Sensors
- Процесор FMU: STM32H753
- 32 Bit Arm® Cortex®-M7, 480MHz, 2MB flash memory, 1MB RAM
- IO Processor: STM32F103
- 32 Bit Arm® Cortex®-M3, 72MHz, 20KB SRAM
- Сенсори на платі
- Акселератор/гіроскоп: BMI088
- Accel/Gyro: ICM-42688-P
- Accel/Gyro: ICM-20649
- Mag: RM3100
- Барометр: 2x ICP-20100
Електричні дані
- Номінальна напруга:
- Максимальна вхідна напруга: 5,7 В
- Вхід USB Power: 4.75~5.25V
- Вхід на серворейку: 0~9.9В
- Номінальний струм:
- Комбінований обмежувач вихідного струму TELEM1 і GPS2: 1,5 А
- Комбінований обмежувач вихідного струму всіх інших портів: 1.5A
Інтерфейси
- 16 PWM виводів сервоприводів
- 1 Виділений R/C вхід для Spektrum / DSM та S.Bus з аналоговим / PWM RSSI входом
- 3 TELEM-порти (з повним контролем потоку)
- 1 UART4(Serial and I2C)
- 2 порти GPS
- 1 повноцінний порт GPS плюс порт перемикача безпеки (GPS1)
- 1 базовий GPS-порт (з I2C, GPS2)
- 2 USB порти
- 1 TYPE-C
- JST GH1.25
- 1 порт Ethernet
- Transformerless Applications
- 100Mbps
- 1 шина SPI
- 2 лінії вибору чіпу
- 2 лінії готових даних
- 1 SPI SYNC лінія
- 1 лінія SPI reset
- 2 CAN шини для CAN периферії
- CAN шина має individual silent controls або ESC RX-MUX control
- 4 порти вводу живлення
- 2 входи живлення Dronecan/UAVCAN
- 2 входи живлення SMBUS/I2C
- 1 AD & IO port
- 2 додаткових аналогових входи (3,3 і 6,6 В)
- 1 PWM/Capture вхід
- 2 виділених для відлагодження
- FMU Debug
- IO debug
Механічні характеристики
- Вага
- Модуль політного контролера: 99г
- Основний модуль: 43г
- Baseboard: 56г
- Operating & storage temperature: -20 ~ 85°c
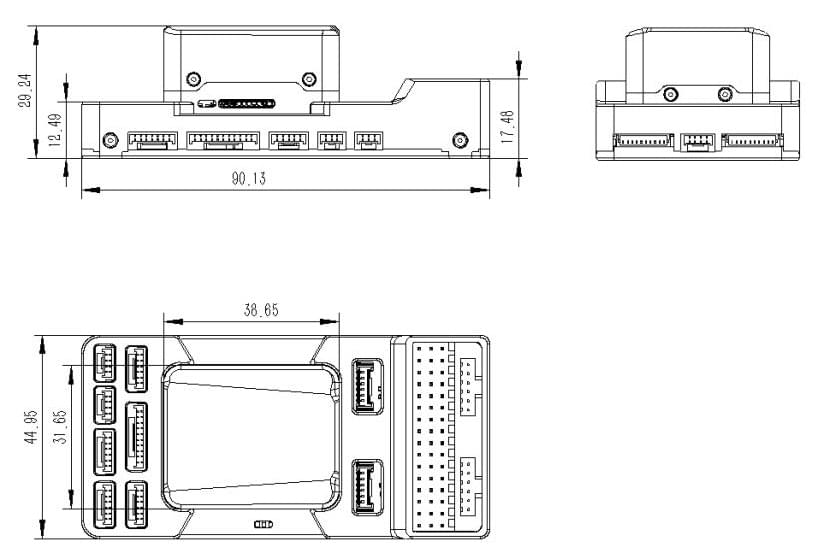
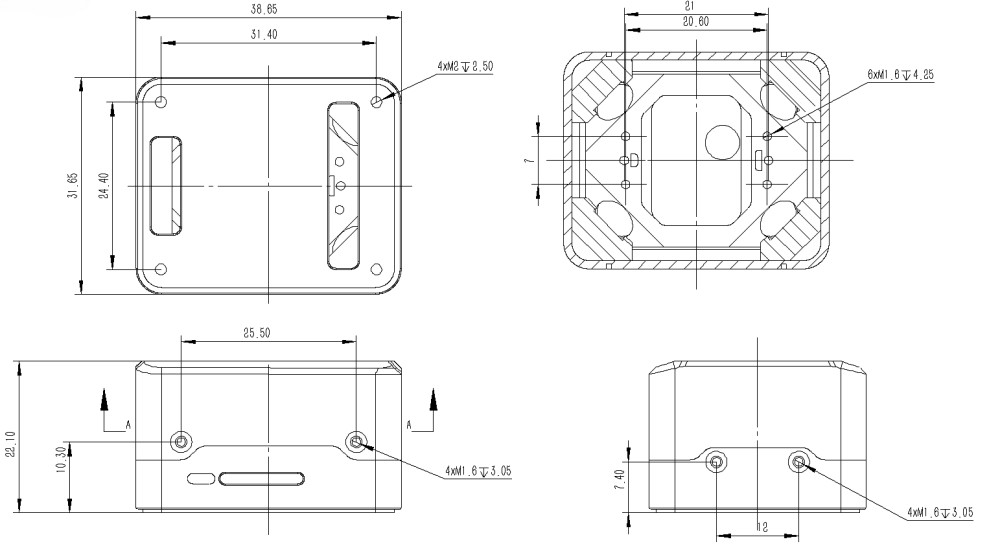
- Розмір
Політний контролер
Основний модуль
Where to Buy
Order from CUAV.
Зборка/інсталяція
The Pixhawk V6X Wiring Quick Start provides instructions on how to assemble required/important peripherals including GPS, Power Module etc.
Схема розташування виводів
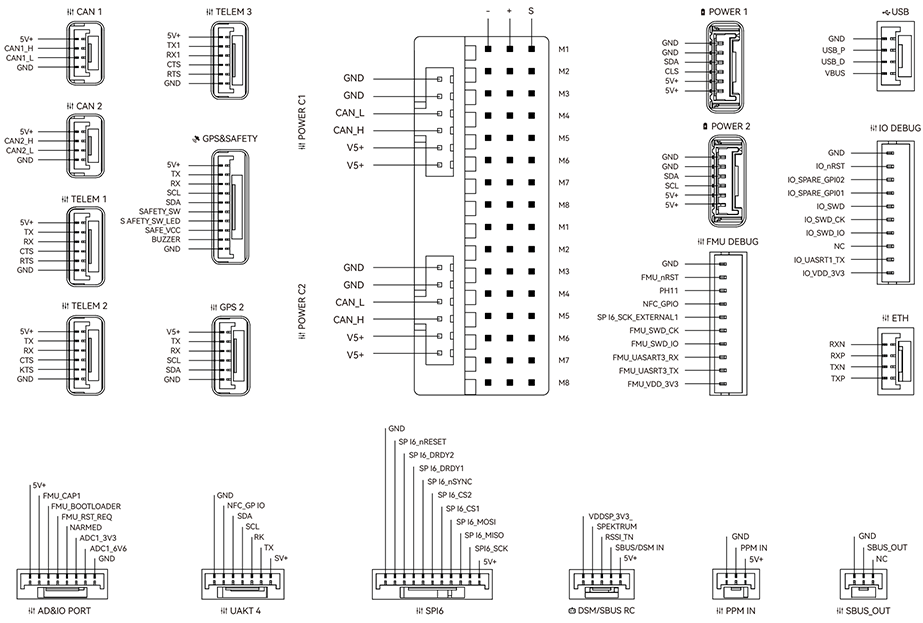
Notes:
- The camera capture pin (
PI0) is pin 2 on the AD&IO port, marked above asFMU_CAP1.
Налаштування послідовного порту
| UART | Пристрій | Порт |
|---|---|---|
| USART1 | /dev/ttyS0 | GPS |
| USART2 | /dev/ttyS1 | TELEM3 |
| USART3 | /dev/ttyS2 | Debug Console |
| UART4 | /dev/ttyS3 | UART4 |
| UART5 | /dev/ttyS4 | TELEM2 |
| USART6 | /dev/ttyS5 | PX4IO/RC |
| UART7 | /dev/ttyS6 | TELEM1 |
| UART8 | /dev/ttyS7 | GPS2 |
Номінальна напруга
Pixhawk V6X can be triple-redundant on the power supply if three power sources are supplied. The three power rails are: POWERC1/POWER1, POWERC2/POWER2 and USB.
- POWER C1 and POWER C2 are DroneCAN/UAVCAN battery interfaces (recommended);POWER1 and POWER2 are SMbus/I2C battery interfaces (backup).
- POWER C1 and POWER1 use the same power switch, POWER C2 and POWER2 use the same power switch.
Normal Operation Maximum Ratings
За таких умов всі джерела живлення будуть використовуватися в цьому порядку для живлення системи:
- POWER C1, POWER C2, POWER1 and POWER2 inputs (4.75V to 5.7V)
- USB input (4.75V to 5.25V)
Absolute Maximum Ratings
За таких умов система не буде витрачати жодної потужності (не буде працювати), але залишиться неушкодженою.
- POWER1 and POWER2 inputs (operational range 4.7V to 5.7V, 0V to 10V undamaged)
- USB input (operational range 4.7V to 5.7V, 0V to 6V undamaged)
- Servo input:
VDD_SERVOpin of FMU PWM OUT and I/O PWM OUT (0V to 42V undamaged)
Voltage monitoring
Digital DroneCAN/UAVCAN battery monitoring is enabled by default (see Quickstart > Power).
INFO
Analog battery monitoring via an ADC is not supported on this particular board, but may be supported in variations of this flight controller with a different baseboard.
Збірка прошивки
TIP
Most users will not need to build this firmware! It is pre-built and automatically installed by QGroundControl when appropriate hardware is connected.
To build PX4 for this target:
make px4_fmu-v6x_defaultDebug Port
The PX4 System Console and SWD interface run on the FMU Debug port.
The pinouts and connector comply with the Pixhawk Debug Full interface defined in the Pixhawk Connector Standard interface (JST SM10B connector).
| Pin | Сигнал | Вольтаж |
|---|---|---|
| 1 (red) | Vtref | +3.3V |
| 2 (blk) | Console TX (OUT) | +3.3V |
| 3 (blk) | Console RX (IN) | +3.3V |
| 4 (blk) | SWDIO | +3.3V |
| 5 (blk) | SWCLK | +3.3V |
| 6 (blk) | SWO | +3.3V |
| 7 (blk) | NFC GPIO | +3.3V |
| 8 (чорний) | PH11 | +3.3V |
| 9 (чорний) | nRST | +3.3V |
| 10 (чорний) | GND | GND |
Інформацію про підключення та використання цього порту див:
- PX4 System Console (Note, the FMU console maps to USART3).
- SWD Debug Port
Периферійні пристрої
Підтримувані платформи / Конструкції
Будь-який мультикоптер / літак / наземна платформа / човен, який може керуватися звичайними RC сервоприводами або сервоприводами Futaba S-Bus. The complete set of supported configurations can be seen in the Airframes Reference.