Holybro Pixhawk 6X Pro
WARNING
PX4 не розробляє цей (або будь-який інший) автопілот. Contact the manufacturer for hardware support or compliance issues.
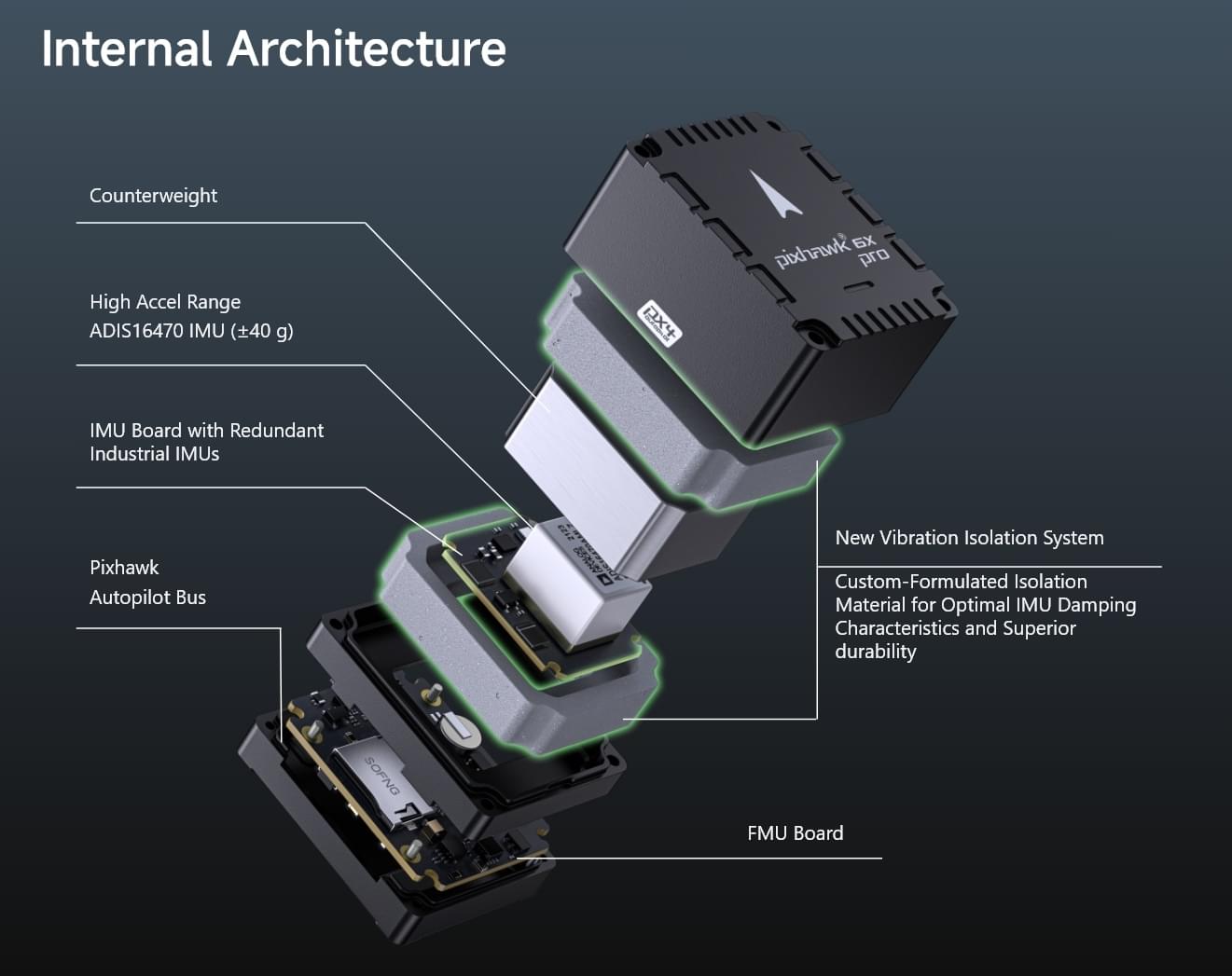
Ключові пункти дизайну
- High-performance ADIS16470 Industrial IMU with high accelerometer dynamic range (±40 g), perfect for accurate motion sensing in demanding UAV applications
- All new advanced durable vibration isolation material with resonance frequency in the higher spectrum, ideal for industrial and commercial drone applications
- Високопродуктивний процесор STM32H753
- Інтерфейс Ethernet для високошвидкісної інтеграції комп'ютера місії
Baseboards
The Pixhawk 6X Pro can be purchased with a number of baseboards (or no baseboard) to suit different use cases and vehicle types, including Standard v2A, Standard v2B, and Mini, which are shown below. It can also be used with any other Pixhawk Autopilot Bus (PAB) specification-compliant baseboard, such as the Holybro Pixhawk Jetson Baseboard and Holybro Pixhawk RPi CM4 Baseboard.



Функції
- Triple redundant IMU & double redundant barometer on separate buses
- Modular flight controller: separated IMU, FMU, and Base system
- Safety-driven design incorporates sensors from different manufacturers and model lineups
- Independent LDO powers every sensor set with independent power control.
- Temperature-controlled IMU board, allowing optimum working temperature of IMUs
Details
Processors & Sensors
- Процесор FMU: STM32H753
- 32 Bit Arm® Cortex®-M7, 480MHz, 2MB flash memory, 1MB RAM
- IO Processor: STM32F103
- 32 Bit Arm® Cortex®-M3, 72MHz, 64KB SRAM
- Сенсори на платі
- Accel/Gyro: ADIS16470 (±40g, Vibration Isolated, Industrial IMU)
- Accel/Gyro: IIM-42652 (±16g, Vibration Isolated, Industrial IMU)
- Accel/Gyro: ICM-45686 with BalancedGyro™ Technology (±32g, Hard Mounted)
- Barometer: ICP20100
- Barometer: BMP388
- Mag: BMM150
Details
Електричні дані
- Номінальна напруга:
- Максимальна вхідна напруга: 6 В
- Вхід USB Power: 4.75~5.25V
- Вхід сервоприводу: 0~36V
- Current Ratings: - Telem1 output current limiter: 1.5A - All other port combined output current limiter: 1.5A
Details
Механічні характеристики
- Розміри
- Flight Controller Module: 38.8 x 31.8 x 30.1mm
- Стандартна базова плата: 52.4 x 103.4 x 16.7mm
- Міні базова плата: 43.4 x 72.8 x 14.2 mm
- Weight - Flight Controller Module: 50g - Standard Baseboard: 51g - Mini Baseboard: 26.5g
Details
Інтерфейси
- 16 PWM виводів сервоприводів
- R/C вхід для Spektrum / DSM
- Виділений R/C вхід для PPM та S.Bus входу
- Спеціалізований аналоговий / PWM вхід RSSI та вивід S.Bus
- 4 загальних послідовних порти
- 3 з повним контролем потоку
- 1 з окремим обмеженням струму 1.5A (Telem1)
- 1 з I2C та додатковою лінією GPIO для зовнішнього NFC зчитувача
- 2 порти GPS
- 1 повний GPS плюс порт запобіжного перемикача
- 1 базовий порт GPS
- 1 I2C порт
- 1 порт Ethernet
- Transformerless Applications
- 100Mbps
- 1 шина SPI
- 2 лінії вибору чіпу
- 2 лінії готових даних
- 1 SPI SYNC лінія
- 1 лінія SPI reset
- 2 CAN шини для CAN периферії
- CAN шина має individual silent controls або ESC RX-MUX control
- 2 Power input ports with SMBus - 1 AD & IO port - 2 additional analog input - 1 PWM/Capture input - 2 Dedicated debug and GPIO lines
Where to Buy
Order from Holybro.
Зборка/інсталяція
The Pixhawk 6X Wiring Quick Start provides instructions on how to assemble required/important peripherals including GPS, Power Module etc.
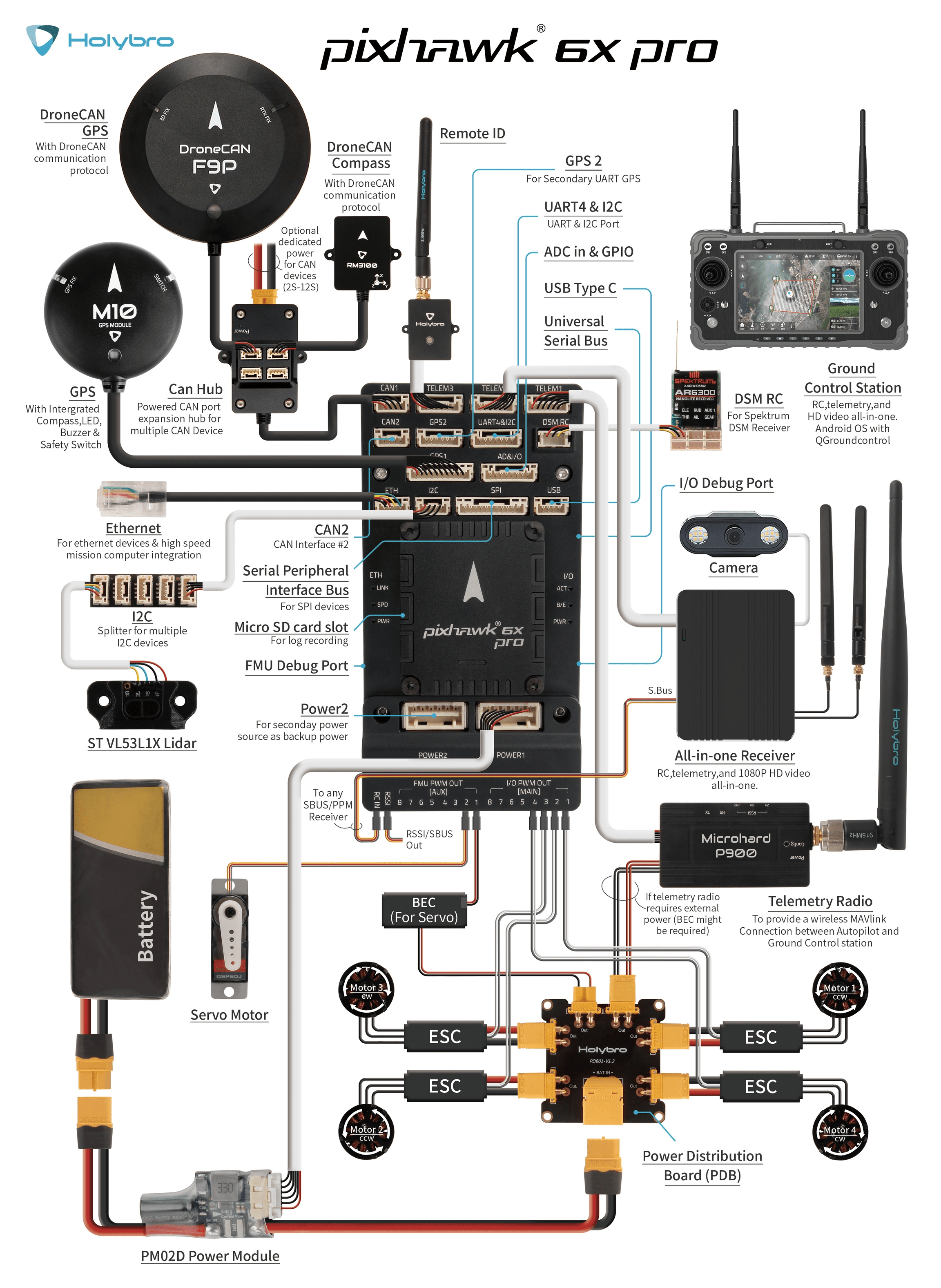
З'єднання
Multicopter Wiring Example
VTOL Wiring Example
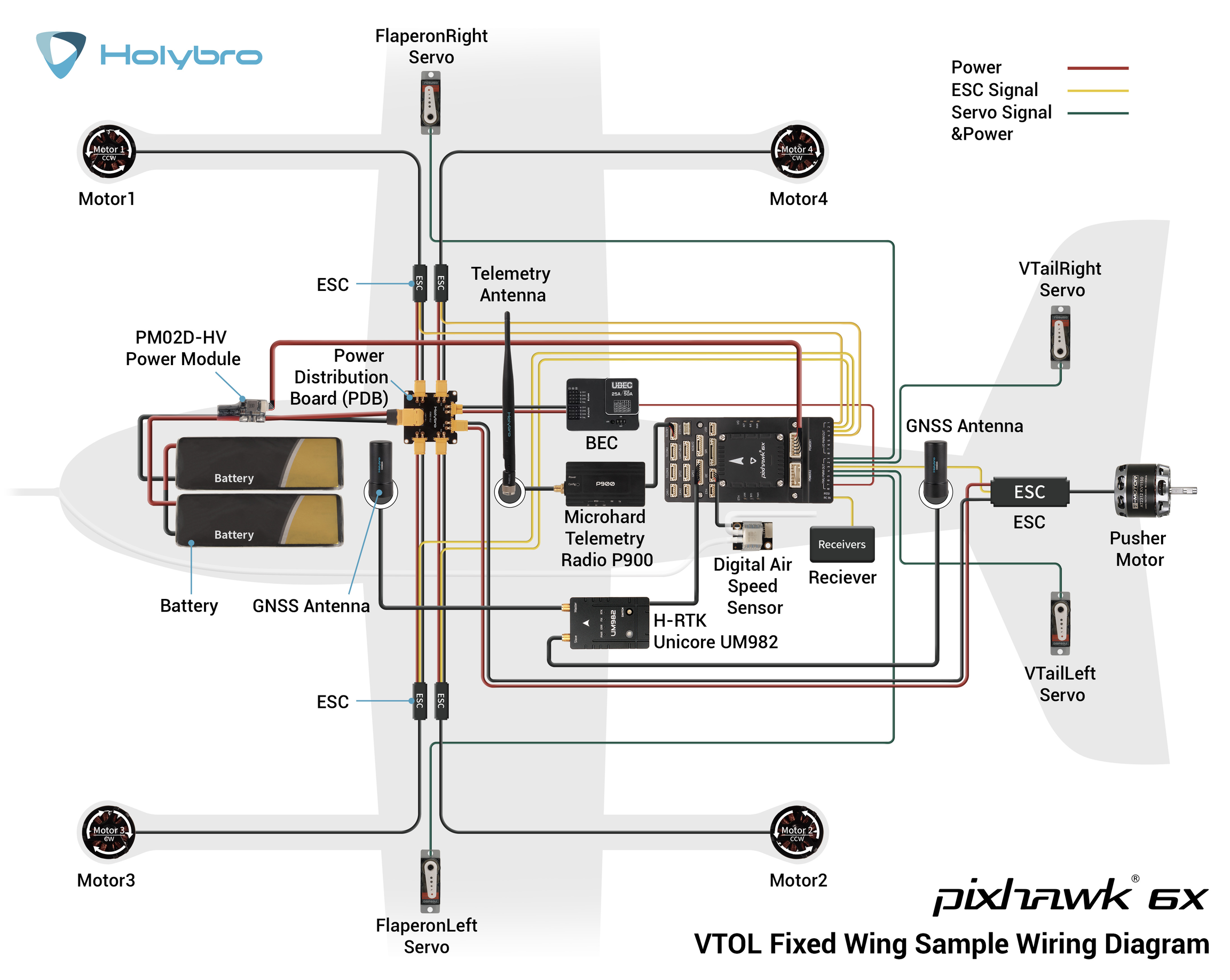
Схема розташування виводів
- Holybro Pixhawk Baseboard Pinout
- Holybro Pixhawk Mini-Baseboard Pinout
- Holybro Pixhawk Jetson Baseboard
- Holybro Pixhawk RPi CM4 Baseboard
Notes:
- The camera capture pin (
PI0) is pin 2 on the AD&IO port, marked above asFMU_CAP1.
Налаштування послідовного порту
| UART | Пристрій | Порт |
|---|---|---|
| USART1 | /dev/ttyS0 | GPS |
| USART2 | /dev/ttyS1 | TELEM3 |
| USART3 | /dev/ttyS2 | Debug Console |
| UART4 | /dev/ttyS3 | UART4 & I2C |
| UART5 | /dev/ttyS4 | TELEM2 |
| USART6 | /dev/ttyS5 | PX4IO/RC |
| UART7 | /dev/ttyS6 | TELEM1 |
| UART8 | /dev/ttyS7 | GPS2 |
Розміри
Номінальна напруга
Pixhawk 6X Pro can be triple-redundant on the power supply if three power sources are supplied. The three power rails are: POWER1, POWER2 and USB. The POWER1 & POWER2 ports on the Pixhawk 6X uses the 6 circuit 2.00mm Pitch CLIK-Mate Wire-to-Board PCB Receptacle.
Normal Operation Maximum Ratings
За таких умов всі джерела живлення будуть використовуватися в цьому порядку для живлення системи:
- POWER1 and POWER2 inputs (4.9V to 5.5V)
- USB input (4.75V to 5.25V)
Absolute Maximum Ratings
За таких умов система не буде витрачати жодної потужності (не буде працювати), але залишиться неушкодженою.
- POWER1 and POWER2 inputs (operational range 4.1V to 5.7V, 0V to 10V undamaged)
- USB input (operational range 4.1V to 5.7V, 0V to 6V undamaged)
- Servo input: VDD_SERVO pin of FMU PWM OUT and I/O PWM OUT (0V to 42V undamaged)
Voltage monitoring
Digital I2C battery monitoring is enabled by default (see Quickstart > Power).
INFO
Analog battery monitoring via an ADC is not supported on this particular board, but may be supported in variations of this flight controller with a different baseboard.
Збірка прошивки
TIP
Most users will not need to build this firmware! It is pre-built and automatically installed by QGroundControl when appropriate hardware is connected.
To build PX4 for this target:
make px4_fmu-v6x_defaultВідладочний порт
The PX4 System Console and SWD interface run on the FMU Debug port.
The pinouts and connector comply with the Pixhawk Debug Full interface defined in the Pixhawk Connector Standard interface (JST SM10B connector).
| Pin | Сигнал | Вольтаж |
|---|---|---|
| 1 (red) | Vtref | +3.3V |
| 2 (blk) | Console TX (OUT) | +3.3V |
| 3 (blk) | Console RX (IN) | +3.3V |
| 4 (blk) | SWDIO | +3.3V |
| 5 (blk) | SWCLK | +3.3V |
| 6 (blk) | SWO | +3.3V |
| 7 (blk) | NFC GPIO | +3.3V |
| 8 (чорний) | PH11 | +3.3V |
| 9 (чорний) | nRST | +3.3V |
| 10 (чорний) | GND | GND |
Інформацію про використання цього порту див:
- SWD Debug Port
- PX4 System Console (Note, the FMU console maps to USART3).
Периферійні пристрої
- Telemetry Radio Modules
- Rangefinders/Distance sensors
- Holybro Sensors
- Holybro GPS & RTK Systems
- Power Modules & PDBs
Supported Platforms/Airframes
Будь-який мультикоптер / літак / наземна платформа / човен, який може керуватися звичайними RC сервоприводами або сервоприводами Futaba S-Bus. The complete set of supported configurations can be seen in the Airframes Reference.
CAD File
Download here.