Польотний контролер Hex Cube Black
WARNING
PX4 не розробляє цей (або будь-який інший) автопілот. Contact the manufacturer for hardware support or compliance issues.
TIP
The Cube Orange is the successor to this product. We recommend however to consider products built on industry standards, such as the Pixhawk Standards. Цей контролер польоту не дотримується стандарту і використовує патентований роз'єм.
The Hex Cube Black flight controller (previously known as Pixhawk 2.1) is a flexible autopilot intended primarily for manufacturers of commercial systems. It is based on the Pixhawk-project FMUv3 open hardware design and runs PX4 on the NuttX OS.
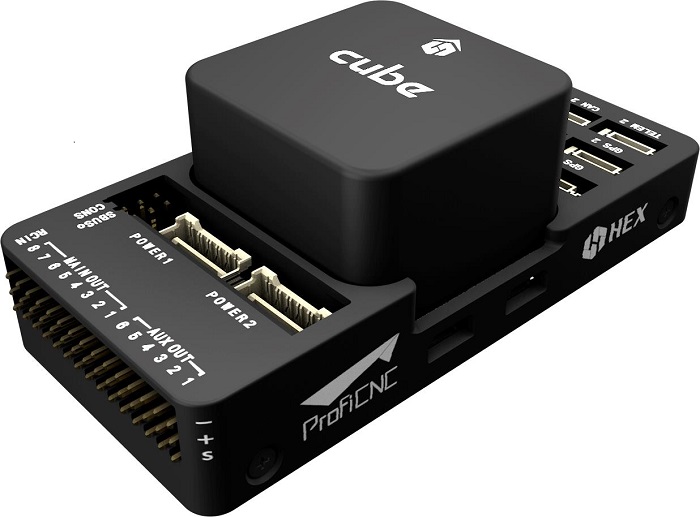
Контролер призначений для використання зі специфічною для домену несучою платою, щоб зменшити кількість дротів, підвищити надійність і спростити збірку. Наприклад, несуча плата для комерційного інспекційного апарату може містити з'єднання для комп'ютера-компаньйона, в той час як несуча плата для гонщика може включати ESC з рами транспортного засобу.
Cube має віброізоляцію на двох ІВП, з третім фіксованим ІВП в якості еталонного/резервного.
INFO
The manufacturer Cube User Guide contains detailed information, including an overview of the Differences between Cube Colours.
TIP
This autopilot is supported by the PX4 maintenance and test teams.
Основні характеристики
- 32bit STM32F427 Cortex-M4F® core with FPU
- 168 MHz / 252 MIPS
- 256 KB RAM
- 2 МБ флеш-пам'яті (повністю доступна)
- 32 bit STM32F103 відмовостійкий копроцесор
- 14 ШІМ / серво виходів (8 з відмовостійкими і ручним керуванням, 6 допоміжних, сумісних з великими потужностями)
- Широкі можливості підключення додаткових периферійних пристроїв (UART, I2C, CAN)
- Інтегрована система резервного копіювання для відновлення в польоті та ручного керування з виділеним процесором та автономним джерелом живлення (для літаків з фіксованим крилом)
- Резервна система інтегрує систему мікшування, забезпечуючи узгоджені режими автопілота та ручного заміщення ( для літаків з фіксованим крилом)
- Резервні входи живлення та автоматичне перемикання на резервне джерело
- Зовнішній запобіжний вимикач
- Головний візуальний індикатор - багатоколірний світлодіод
- Потужний багатотональний п'єзозвуковий індикатор
- Карта microSD для високошвидкісної фіксації даних протягом тривалого періоду часу
Where to Buy
Cube Black (Reseller list)
Збірка
Характеристики
Процесор
- 32bit STM32F427 Cortex M4 core with FPU
- 168 MHz / 252 MIPS
- 256 KB RAM
- 2 MB Flash (повністю доступна)
- 32 bit STM32F103 відмовостійкий копроцесор
Датчики
- TBA
Інтерфейси
- 5x UART (послідовні порти), один високої потужності, 2x з контролем потоку ГВП
- 2x CAN (один з внутрішнім 3.3В трансивером, один на конекторі розширювача)
- Spektrum DSM / DSM2 / DSM-X® Satellite сумісний вхід
- Futaba S.BUS® сумісний вхід і вивід
- Вхід сигналу PPM sum
- Вхід RSSI (ШІМ або напруга)
- I2C
- SPI
- 3.3В АЦП вхід
- Внутрішній порт microUSB і розширення зовнішнього порту microUSB
Система живлення та захист
- Ідеальний діодний контролер з автоматичним перемиканням на резервне живлення
- Сервопривід високої потужності (max. 10В) і сильного струму (10A+)
- Усі периферійні виводи захищені від перевантаження по струму, усі входи захищені від електростатичного розряду
Номінальна напруга
Pixhawk може мати потрійну резервність у джерелі живлення, якщо подаються три джерела живлення. Три шини: вхід модуля живлення, вхід сервоприводу, вхід USB.
Максимальна напруга нормальної роботи
За таких умов всі джерела живлення будуть використовуватися в цьому порядку для живлення системи
- Вхід модуля живлення (4.8В до 5.4В)
- Servo rail input (4.8V to 5.4V) UP TO 10V FOR MANUAL OVERRIDE, BUT AUTOPILOT PART WILL BE UNPOWERED ABOVE 5.7V IF POWER MODULE INPUT IS NOT PRESENT
- Вхід живлення USB (4.8В до 5.4В)
Абсолютна максимальна напруга
За таких умов система не буде витрачати жодної потужності (не буде працювати), але залишиться неушкодженою.
- Вхід модуля живлення (4.1В до 5.7В, 0В до 20В неушкоджений)
- Вхід сервоприводу (4.1В до 5.7В, 0В до 20В)
- Вхід живлення USB (4.1В до 5.7В, 0В до 6В)
Розпіновки та схеми
Board schematics and other documentation can be found here: The Cube Project.
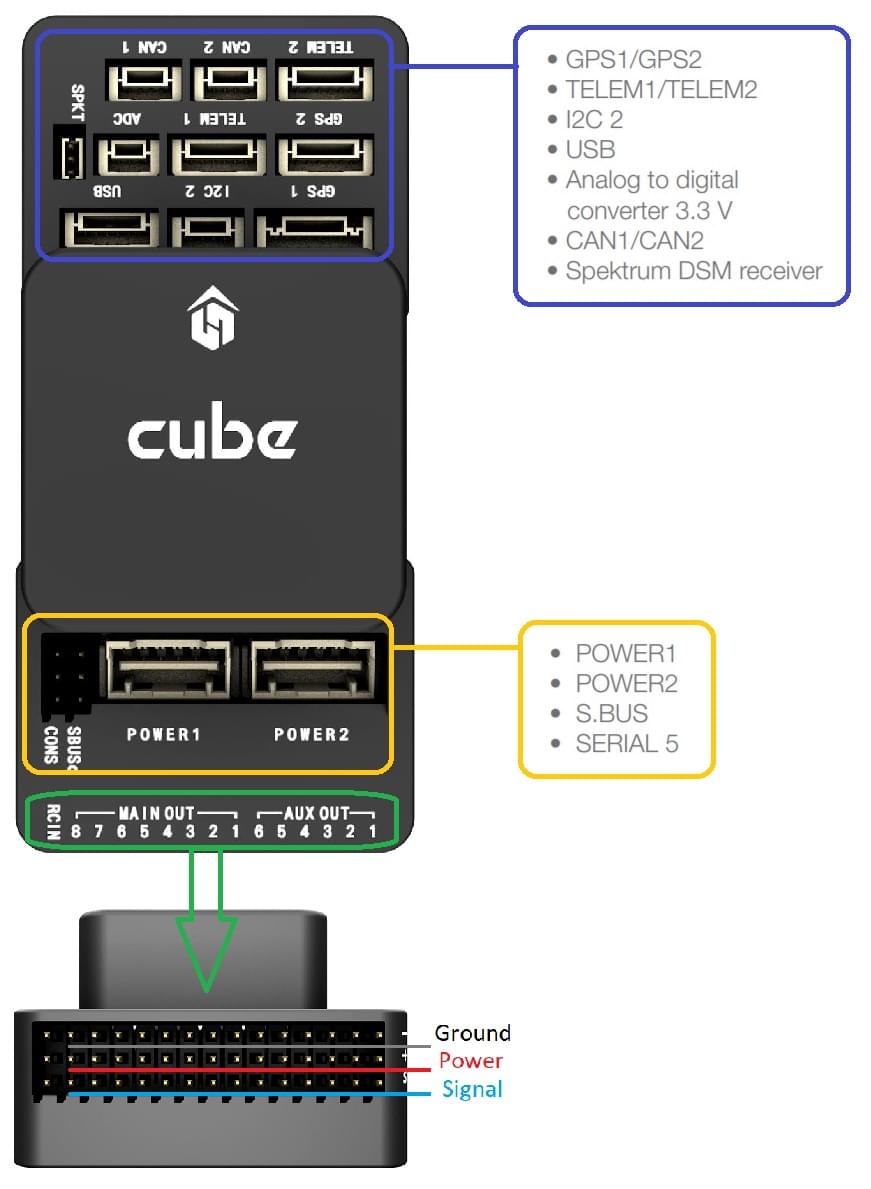
Порти
Верхня частина (GPS, TELEM тощо)
Налаштування послідовного порту
| UART | Пристрій | Порт |
|---|---|---|
| USART1 | /dev/ttyS0 | |
| USART2 | /dev/ttyS1 | TELEM1 (керування потоком) |
| USART3 | /dev/ttyS2 | TELEM2 (керування потоком) |
| UART4 | /dev/ttyS3 | GPS1 |
| USART6 | /dev/ttyS4 | PX4IO |
| UART7 | /dev/ttyS5 | CONSOLE |
| UART8 | /dev/ttyS6 |
Відладочні порти

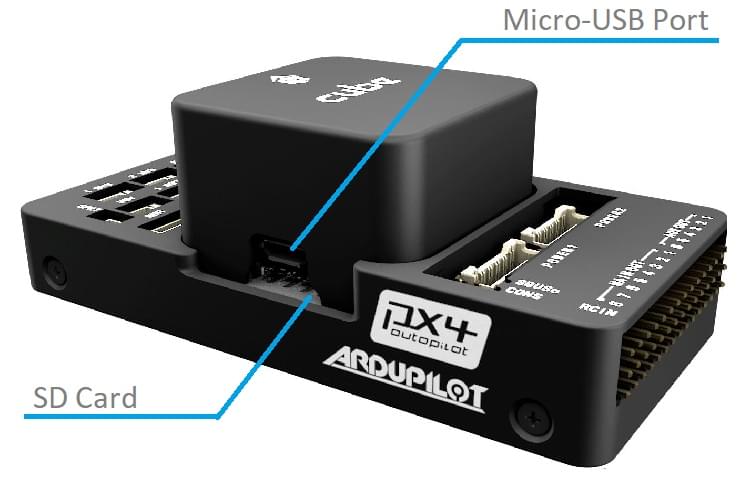
Порти USB/SDCard
Збірка прошивки
TIP
Most users will not need to build this firmware! It is pre-built and automatically installed by QGroundControl when appropriate hardware is connected.
To build PX4 for this target:
make px4_fmu-v3_defaultПроблеми
Розташування сілкскрінів CAN1 і CAN2 на Cube Black перевернуте (CAN1 - це CAN2 і навпаки).
Додаткова інформація/документація
- Cube Wiring Quickstart
- Cube Docs (виробник):