Інтерфейс керування PX4 ROS 2
PX4 v1.15 ExperimentalWARNING
Експериментальні налаштування At the time of writing, parts of the PX4 ROS 2 Control Interface are experimental, and hence subject to change:
- Архітектура та основні інтерфейси для визначення режимів ROS 2 є значною мірою стабільними і перевіряються в ІК. Бібліотека надає значні переваги в режимі офборду в поточному стані.
- Лише кілька типів значень було врегульовано (інші все ще в розробці). Вам можуть знадобитися внутрішні теми PX4, які можуть не залишитись серверно-сумісними з часом.
- API не повністю задокументований.
The PX4 ROS 2 Interface Library is a C++ library (with Python bindings) that simplifies controlling PX4 from ROS 2.
Розробники використовують бібліотеку для створення і динамічної реєстрації режимів, написаних за допомогою ROS 2. Ці режими динамічно реєструються в PX4 і здаються частиною PX4 для наземної станції або іншої зовнішньої системи. Вони навіть можуть замінити стандартні режими в PX4 на покращені версії ROS 2, відновлюючи оригінальну версію, якщо режим ROS2 не вдасться.
Бібліотека також надає класи для надсилання різних типів налаштувань, починаючи від багаторівневих навігаційних завдань на високому рівні аж до прямого контролю приводу. Ці класи абстрагують внутрішні встановлені точки, які використовуються PX4, і, отже, їх можна використовувати для надання послідовного інтерфейсу ROS 2 для майбутніх версій PX4 і ROS.
PX4 ROS 2 modes are easier to implement and maintain than PX4 internal modes, and provide more resources for developers in terms of processing power and pre-existing libraries. Unless the mode is safety-critical, requires strict timing or very high update rates, or your vehicle doesn't have a companion computer, you should consider using PX4 ROS 2 modes in preference to PX4 internal modes.
TIP
If you want to use Python, check out the examples in the repository. Not all classes have Python bindings yet — the supported bindings are here. You are welcome to add and contribute missing classes.
Загальний огляд
Ця діаграма надає концептуального уявлення про те, як режими інтерфейсу і режими керування будуть взаємодіяти з PX4.

Наступні розділи визначають та пояснюють терміни, що використовуються в діаграмі.
Означення
Режим
Режим визначений за допомогою бібліотеки інтерфейсу має такі властивості:
- Режим - це компонент, який може передавати вказані точки автомобіля для керування рухом (такі як швидкість або прямі вимикачі).
- Режим вибирає тип значень і відправляє його під час активності. Він може переключитися між різними типами множин.
- Режим не може активувати інші режими, і він повинен бути активований користувачем (через RC/GCS), контролер польоту в безпечній ситуації mode executor, або деяких інших зовнішніх системах.
- Має ім'я, яке відображається у GCS.
- Можна налаштувати вимоги до його режиму (наприклад, що він вимагає достовірної оцінки позиції).
- Режим може виконувати різні завдання, такі як польот до цілі, спуск лебідки, скидання вантажу та повернення назад.
- Режим може замінити режим, визначений у PX4.
Виконавець Режимів
Виконавець режимів - це необов'язковий компонент для розкладання режимів. Наприклад, виконавець режимів для індивідуальної доставки вантажу або режиму обстеження може спочатку ініціювати злет, потім переключитися на індивідуальний режим, і коли він завершиться, ініціювати повернення на базу (RTL).
Зокрема, він має наступні властивості:
- Виконавець режимів - це необов'язковий компонент, який знаходиться на рівень вище за режим. Це скінченний автомат, який може активувати режими і чекати їх завершення.
- Це може зробити лише поки він є відповідним. Для цього виконавець має лише один власний режим (і режим може належати лише одному виконавцю). Цей режим служить для активації виконавця: коли користувач вибирає режим, активується власник-виконавець, який може вибрати будь-який режим. Він залишається відповідальним до того моменту, поки користувач не змінить режими (через RC або з GCS), або не спрацює аварійний перехід в інший режим. Якщо аварійна ситуація знімається, виконавець знову активується.
- Це дозволяє існувати декільком виконавцям одночасно.
- Виконувачі не можуть активувати інших виконавців.
- У бібліотеці виконавець режимів завжди реалізується в комбінації з індивідуальним режимом.
INFO
- Ці визначення гарантують, що користувач може в будь-який момент забрати контроль від індивідуального режиму або виконавця, командуючи переключення режиму через RC або GCS. Виконавець режимів є прозорим для користувача.
- Виконавець режиму є прозорий для користувача. Він вибирається і активується опосередковано через власний режим, і тому режим має бути відповідно названий.
Перевизначення конфігурації
Обидва режими і виконавці можуть визначати заміну конфігурації, дозволяючи персоналізацію певних поведінок, коли режим або виконавець активний.
Наразі реалізовано наступне:
- Вимкнення автоматичного роз'єднання. Це дозволяє здійснити посадку та знову злетіти (наприклад, для скидання вантажу).
- Можливість відкласти неістотні збої помилки. Це дозволяє виконавцю проводити дію без переривання через некритичні заходи безпеки. Наприклад, ігнорування заходу безпеки через низький заряд батареї, щоб операція з лебідкою могла бути завершена.
Порівняння з управлінням з віддаленої платформи
Вищезазначені концепції мають кілька переваг перед традиційним управлінням з віддаленої платформи:
- Декілька вузлів або додатків можуть співіснувати і навіть працювати одночасно. Але лише один вузол може керувати транспортним засобом у певний момент, і цей вузол чітко визначений.
- Режими мають відмінну назву і можуть бути відображені / вибрані в GCS.
- Режими інтегровані з аварійною машиною стану та перевірками настроювання.
- Типи установок, які можуть бути відправлені, чітко визначені.
- Режими ROS 2 можуть замінити внутрішні режими контролера польоту (такі як режим повернення).
Установка та перший тест
Для початку роботи потрібно виконати наступні кроки:
Make sure you have a working ROS 2 setup, with
px4_msgsin the ROS 2 workspace.Клонуйте репозиторій в робочий простір:
shcd $ros_workspace/src git clone --recursive https://github.com/Auterion/px4-ros2-interface-libINFO
Для забезпечення сумісності, використовуйте останні main гілки для PX4, px4_msgs та бібліотеки. Дивіться також here.
:::
Побудуйте робочий простір:
shcd .. colcon build source install/setup.bashУ іншій оболонці запустіть PX4 SITL:
shcd $px4-autopilot make px4_sitl gazebo-classic(тут ми використовуємо Gazebo-Classic, але ви можете використовувати будь-яку модель або симулятор)
Запустіть агента micro XRCE в новій оболонці (після цього ви можете залишити його запущеним):
shMicroXRCEAgent udp4 -p 8888Запустіть QGroundControl.
INFO
Використовуйте QGroundControl Daily, яка підтримує динамічне оновлення списку режимів.
:::
Повернутись до терміналу 2 ROS, запустити один із прикладів:
shros2 run example_mode_manual_cpp example_mode_manualВи повинні отримати на виході режим 'Мій ручний режим' зареєстрований:
sh[DEBUG] [example_mode_manual]: Checking message compatibility... [DEBUG] [example_mode_manual]: Subscriber found, continuing [DEBUG] [example_mode_manual]: Publisher found, continuing [DEBUG] [example_mode_manual]: Registering 'My Manual Mode' (arming check: 1, mode: 1, mode executor: 0) [DEBUG] [example_mode_manual]: Subscriber found, continuing [DEBUG] [example_mode_manual]: Publisher found, continuing [DEBUG] [example_mode_manual]: Got RegisterExtComponentReply [DEBUG] [example_mode_manual]: Arming check request (id=1, only printed once)На PX4 оболонці ви можете перевірити, що PX4 зареєстрував новий режим:
shcommander statusВихід має містити:
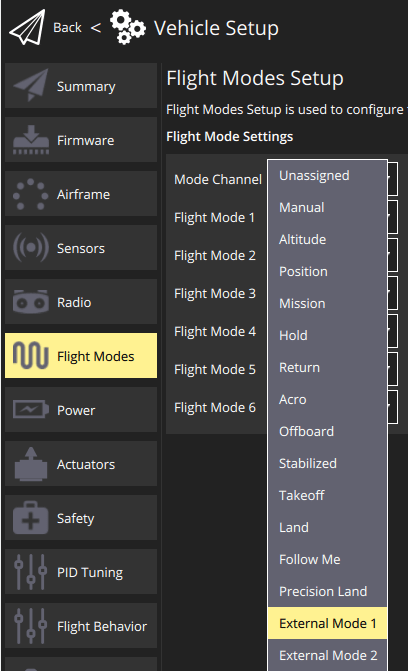
plainINFO [commander] Disarmed INFO [commander] navigation mode: Position INFO [commander] user intended navigation mode: Position INFO [commander] in failsafe: no INFO [commander] External Mode 1: nav_state: 23, name: My Manual ModeУ цій точці ви також повинні побачити режим в QGroundControl :
Виберіть режим, переконайтеся, що у вас є ручне джерело управління (фізичний або віртуальний джойстик), та озброєння транспорту. Тоді режим активується, і він має вивести наступний вивід:
sh[DEBUG] [example_mode_manual]: Mode 'My Manual Mode' activatedТепер ви готові створити свій власний режим.
Як користуватися бібліотекою
Наступні розділи описують конкретні функціональні можливості, які надає ця бібліотека. Крім того, можна підписуватися на будь-яку іншу тему PX4 або публікувати у неї.
Визначення класу режиму
У цьому розділі розглядається приклад створення класу для власного режиму.
Для повного застосування перегляньте приклади в репозиторії Auterion/px4-ros2-interface-lib, такі як examples/cpp/modes/manual.
class MyMode : public px4_ros2::ModeBase // [1]
{
public:
explicit MyMode(rclcpp::Node & node)
: ModeBase(node, Settings{"My Mode"}) // [2]
{
// [3]
_manual_control_input = std::make_shared<px4_ros2::ManualControlInput>(*this);
_rates_setpoint = std::make_shared<px4_ros2::RatesSetpointType>(*this);
}
void onActivate() override
{
// Called whenever our mode gets selected
}
void onDeactivate() override
{
// Called when our mode gets deactivated
}
void updateSetpoint(const rclcpp::Duration & dt) override
{
// [4]
const Eigen::Vector3f thrust_sp{0.F, 0.F, -_manual_control_input->throttle()};
const Eigen::Vector3f rates_sp{
_manual_control_input->roll() * 150.F * M_PI / 180.F,
-_manual_control_input->pitch() * 150.F * M_PI / 180.F,
_manual_control_input->yaw() * 100.F * M_PI / 180.F
};
_rates_setpoint->update(rates_sp, thrust_sp);
}
private:
std::shared_ptr<px4_ros2::ManualControlInput> _manual_control_input;
std::shared_ptr<px4_ros2::RatesSetpointType> _rates_setpoint;
};[1]: Спочатку ми створюємо клас, який успадковується відpx4_ros2::ModeBase.[2]: У конструкторі ми передаємо назву режиму. Це також дозволяє нам налаштувати деякі інші речі, наприклад, замінити внутрішній режим польоту.[3]: Саме тут ми створюємо всі об'єкти, через які ми хочемо використовувати пізніше. Це може бути RC на виведення, значення типу або телеметрія.*thisпередається якКонтекстдо кожного об'єкту, який асоціює об'єкт з режимом.[4]: Кожен раз, коли режим активний, цей метод викликається регулярно (частота оновлення залежить від типу вказаної точки). Ось де ми можемо працювати і створювати нову установку.
Після створення екземпляру цього режиму потрібно викликати mode->doRegister(), яке фактично реєструється з контролером польоту і повертає false у разі невдачі. У разі використання виконавця режиму, doRegister() повинно бути викликано на виконавці режиму, а не на самому режимі.
Визначення класу виконавця режиму
У цьому розділі розглядається приклад створення класу для власного режиму.
class MyModeExecutor : public px4_ros2::ModeExecutorBase // [1]
{
public:
MyModeExecutor(px4_ros2::ModeBase & owned_mode) // [2]
: ModeExecutorBase(px4_ros2::ModeExecutorBase::Settings{}, owned_mode),
_node(owned_mode.node())
{ }
enum class State // [3]
{
Reset,
TakingOff,
MyMode,
RTL,
WaitUntilDisarmed,
};
void onActivate() override
{
runState(State::TakingOff, px4_ros2::Result::Success); // [4]
}
void onDeactivate(DeactivateReason reason) override { }
void runState(State state, px4_ros2::Result previous_result)
{
if (previous_result != px4_ros2::Result::Success) {
RCLCPP_ERROR(_node.get_logger(), "State %i: previous state failed: %s", (int)state,
resultToString(previous_result));
return;
}
switch (state) { // [5]
case State::Reset:
break;
[1]: Спочатку ми створюємо клас, який наслідується відpx4_ros2::ModeExecutorBase.- [2]: Конструктор приймає наш власний режим, який пов'язаний з виконавцем, і передає його в конструктор ModeExecutorBase.
- [3]: Ми визначаємо перерахування для станів, через які ми хочемо пройти.
- [4]: Метод onActivate викликається, коли виконавець стає активним. На цій точці ми можемо почати проходити через наші стани. Як ви це робите - це на ваш розсуд, у цьому прикладі використовується метод runState для виконання наступного стану.
- [5]: При переході до стану ми викликаємо асинхронний метод від ModeExecutorBase для запуску бажаного режиму: run, takeoff, rtl і так далі. Ці методи передають функцію, яка викликається при завершенні; зворотний виклик надає аргумент Result, який вказує, чи вдалося виконання чи ні. У разі успіху зворотний виклик запускає наступний стан.
- [6]: Ми використовуємо метод scheduleMode(), щоб запустити "власний режим" виконавця, слідуючи тому ж шаблону, що й інші обробники станів.
Типи установок
Режим може вибрати тип(и) установки, які він хоче використовувати для керування транспортним засобом. Використані типи також визначають сумісність з різними типами транспортних засобів.
Наступні розділи надають список підтримуваних типів установок:
- MulticopterGotoSetpointType: MC only Smooth position and (optionally) heading control
- FwLateralLongitudinalSetpointType: FW only PX4 v1.17 Direct control of lateral and longitudinal fixed wing dynamics
- DirectActuatorsSetpointType: Пряме керування моторами та установками сервоприводів польотних поверхонь
- Rover Setpoints: PX4 v1.17 Direct access to rover control setpoints (Position, Speed, Attitude, Rate, Throttle and Steering).
TIP
The other setpoint types are currently experimental, and can be found in: px4_ros2/control/setpoint_types/experimental.
Ви можете додати свої власні типи установок, додавши клас, який успадковується від px4_ros2::SetpointBase, встановлює прапорці конфігурації відповідно до того, що вимагає установка, а потім публікує будь-яку тему, що містить установку
Go-to Setpoint (MulticopterGotoSetpointType)
MC onlyMulticopter onlyINFO
This setpoint type is currently only supported for multicopters.
Smoothly control position and (optionally) heading setpoints with the px4_ros2::MulticopterGotoSetpointType setpoint type. The setpoint type is streamed to FMU based position and heading smoothers formulated with time-optimal, maximum-jerk trajectories, with velocity and acceleration constraints.
There is also a px4_ros2::MulticopterGotoGlobalSetpointType class that allows to send setpoints in global coordinates.
Найбільш тривіальне використання полягає в простому введенні 3D-позиції в метод оновлення:
const Eigen::Vector3f target_position_m{-10.F, 0.F, 3.F};
_goto_setpoint->update(target_position_m);У цьому випадку заголовок залишиться uncontrolled. Для додаткового контрольного заголовку, вкажіть його в якості другого вхідного аргументу:
const Eigen::Vector3f target_position_m{-10.F, 0.F, 3.F};
const float heading_rad = 3.14F;
_goto_setpoint->update(
target_position_m,
heading_rad);Додатковою особливістю установки цільової точки є динамічний контроль за межами швидкості плавних рухів (тобто максимальні горизонтальні та вертикальні швидкості трансляції, а також швидкість руху по курсу). Якщо, як вище, не вказано, то плавники за замовчуванням приймуть максимальні значення за замовчуванням транспортного засобу (зазвичай встановлені на фізичні обмеження). Плавники можуть тільки зменшувати межі швидкості, але ніколи не збільшувати.
_goto_setpoint->update(
target_position_m,
heading_rad,
max_horizontal_velocity_m_s,
max_vertical_velocity_m_s,
max_heading_rate_rad_s);Усі аргументи у методі оновлення, крім позиції, є зразками у вигляді std::optional<float>, що означає, що якщо хтось бажає обмежити швидкість руху по курсу, але не швидкості трансляції, це можливо за допомогою std::nullopt:
_goto_setpoint->update(
target_position_m,
heading_rad,
std::nullopt,
std::nullopt,
max_heading_rate_rad_s);Fixed-Wing Lateral and Longitudinal Setpoint (FwLateralLongitudinalSetpointType)
Fixed wing only PX4 v1.17INFO
This setpoint type is supported for fixed-wing vehicles and for VTOLs in fixed-wing mode.
Use the px4_ros2::FwLateralLongitudinalSetpointType to directly control the lateral and longitudinal dynamics of a fixed-wing vehicle — that is, side-to-side motion (turning/banking) and forward/vertical motion (speeding up and climbing/descending), respectively. This setpoint is streamed to the PX4 FwLateralLongitudinalControl module, which decouples lateral and longitudinal inputs while ensuring that vehicle limits are respected.
To control the vehicle, at least one lateral and one longitudinal setpoint must be provided:
- Of the longitudinal inputs: either
altitudeorheight_ratemust be finite to control vertical motion. If both are set toNAN, the vehicle will maintain its current altitude. - Of the lateral inputs: at least one of
course,airspeed_direction, orlateral_accelerationmust be finite.
For a detailed description of the controllable parameters, please refer to message definitions (FixedWingLateralSetpoint and FixedWingLongitudinalSetpoint).
Основне використання
This type has a number of update methods, each allowing you to specify an increasing number of setpoints.
The simplest method is updateWithAltitude(), which allows you to specify a course and altitude target setpoint:
const float altitude_msl = 500.F;
const float course = 0.F; // due North
_fw_lateral_longitudinal_setpoint->updateWithAltitude(altitude_msl, course);PX4 uses the setpoints to compute the roll angle, pitch angle and throttle setpoints that are sent to lower level controllers. Note that the commanded flight is expected to be relatively gentle/unaggressive when using this method. This is done as follows:
Lateral control output:
course setpoint (set by user) → airspeed direction (heading) setpoint → lateral acceleration setpoint → roll angle setpoint.
Longitudinal control output:
altitude setpoint (set by user) → height rate setpoint → pitch angle setpoint and throttle settings.
The updateWithHeightRate() method allows you to set a target course and height_rate (this is useful if the speed of ascent or descent matters, or needs to be dynamically controlled):
const float height_rate = 2.F;
const float course = 0.F; // due North
_fw_lateral_longitudinal_setpoint->updateWithHeightRate(height_rate, course);The updateWithAltitude() and updateWithHeightRate() methods allow you to additionally control the equivalent airspeed or lateral acceleration by specifying them as the third and fourth arguments, respectively:
const float altitude_msl = 500.F;
const float course = 0.F; // due North
const float equivalent_aspd = 15.F; // m/s
const float lateral_acceleration = 2.F; // FRD, used as feedforward
_fw_lateral_longitudinal_setpoint->updateWithAltitude(altitude_msl,
course,
equivalent_aspd,
lateral_acceleration);The equivalent airspeed and lateral acceleration arguments are defined as std::optional<float>, so you can omit any of them by passing std::nullopt.
TIP
If both lateral acceleration and course setpoints are provided, the lateral acceleration setpoint will be used as feedforward.
Full Control Using the Setpoint Struct
For full flexibility, you can create and pass a FwLateralLongitudinalSetpoint struct. Each field is templated with std::optional<float>.
TIP
If both course and airspeed direction are set: airspeed direction takes precedence, course is not controlled. Lateral acceleration is treated as feedforward if either course or airspeed direction are also finite. If both altitude and height rate are set: height rate takes precedence, altitude is not controlled.
px4_ros2::FwLateralLongitudinalSetpoint setpoint_s;
setpoint_s.withCourse(0.F);
// setpoint_s.withAirspeedDirection(0.2F); // uncontrolled
setpoint_s.withLateralAcceleration(2.F); // feedforward
//setpoint_s.withAltitude(500.F); // uncontrolled
setpoint_s.withHeightRate(2.F);
setpoint_s.withEquivalentAirspeed(15.F);
_fw_lateral_longitudinal_setpoint->update(setpoint_s);The diagram below illustrates the interaction between the FwLateralLongitudinalSetpointType and PX4 when all inputs are set.

Advanced Configuration (Optional)
You can also pass a FwControlConfiguration struct along with the setpoint to override default controller settings and constraints such as pitch limits, throttle limits, and target sink/climb rates. This is intended for advanced users:
px4_ros2::FwLateralLongitudinalSetpoint setpoint_s;
setpoint_s.withAirspeedDirection(0.F);
setpoint_s.withLateralAcceleration(2.F); // feedforward
setpoint_s.withAltitude(500.F);
setpoint_s.withEquivalentAirspeed(15.F);
px4_ros2::FwControlConfiguration config_s;
config_s.withTargetClimbRate(3.F);
config_s.withMaxAcceleration(5.F);
config_s.withThrottleLimits(0.4F, 0.6F);
_fw_lateral_longitudinal_setpoint->update(setpoint_s, config_s);All configuration fields are defined as std::optional<float>. Unset values will default to the PX4 configuration. See LateralControlConfiguration and FixedWingLongitudinalConfiguration for more information on configuration options.
INFO
For safety, PX4 automatically limits configuration values to stay within the vehicle’s constraints. For example, throttle overrides are clamped to remain between FW_THR_MIN and FW_THR_MAX.
Безпосереднє значення параметра Control (DirectActuatorsSetpointType)
Клапани можна безпосередньо керувати, використовуючи тип встановлення px4_ros2::DirectActuatorsSetpointType. Мотори і сервоприводи можна встановити незалежно один від одного. Будьте уважні, що призначення є транспортним засобом та специфікацією. Наприклад, для управління квадрокоптером потрібно встановити перші 4 мотори відповідно до його конфігурації виводу.
INFO
Якщо ви хочете керувати клапаном, який не контролює рух транспортного засобу, але, наприклад, сервопривід навантаження, подивіться нижче.
Rover Setpoints
PX4 v1.17 ExperimentalThe rover modules use a hierarchical structure to propagate setpoints:

INFO
The "highest" setpoint that is provided will be used within the PX4 rover modules to generate the setpoints that are below it (Overriding them!). With this hierarchy there are clear rules for providing a valid control input:
- Provide a position setpoint, or
- One of the setpoints on the "left" (speed or throttle) and one of the setpoints on the "right" (attitude, rate or steering). All combinations of "left" and "right" setpoints are valid.
For ease of use we expose these valid combinations as new SetpointTypes.
The RoverSetpointTypes exposed through the control interface are combinations of these setpoints that lead to a valid control input:
| SetpointType | Положення | Speed | Throttle | Attitude | Rate | Steering | Control Flags |
|---|---|---|---|---|---|---|---|
| RoverPosition | ✓ | (✓) | (✓) | (✓) | (✓) | (✓) | Position, Velocity, Attitude, Rate, Control Allocation |
| RoverSpeedAttitude | ✓ | (✓) | ✓ | (✓) | (✓) | Velocity, Attitude, Rate, Control Allocation | |
| RoverSpeedRate | ✓ | (✓) | ✓ | (✓) | Velocity, Rate, Control Allocation | ||
| RoverSpeedSteering | ✓ | (✓) | ✓ | Velocity, Control Allocation | |||
| RoverThrottleAttitude | ✓ | ✓ | (✓) | (✓) | Attitude, Rate, Control Allocation | ||
| RoverThrottleRate | ✓ | ✓ | (✓) | Rate, Control Allocation | |||
| RoverThrottleSteering | ✓ | ✓ | Control Allocation |
✓ are the setpoints we publish, and (✓) are generated internally by the PX4 rover modules according to the hierarchy above.
An example for a rover specific drive mode using the RoverSpeedAttitudeSetpointType is provided here.
Controlling a VTOL
PX4 v1.17 ExperimentalTo control a VTOL in an external flight mode, ensure you're returning the correct setpoint type based on the current flight configuration:
- Multicopter mode: use a setpoint type that is compatible with multicopter control. For example: either the
MulticopterGotoSetpointTypeor theTrajectorySetpointType. - Fixed-wing mode: Use the
FwLateralLongitudinalSetpointType.
As long as the VTOL remains in either multicopter or fixed-wing mode throughout the external mode, no additional handling is required.
If you would like to command a VTOL transition in your external mode, you need to use the VTOL API. The VTOL API provides the functionality to command a transition and query the current state of the vehicle.
Use this API with caution! Commanding transitions externally makes the user partially responsible for ensuring smooth and safe behavior, unlike onboard transitions (e.g. via RC switch) where PX4 handles the full process:
Ensure that both the
TrajectorySetpointTypeand theFwLateralLongitudinalSetpointTypeare available to your mode.Create an instance of
px4_ros2::VTOLin the constructor of your mode.To command a transition, you can use the
toMulticopter()ortoFixedwing()methods on your VTOL object to set the desired state.During transition, send the following combination of setpoints:
cpp// Assuming the instance of the px4_ros2::VTOL object is called vtol // Send TrajectorySetpointType as follows: Eigen::Vector3f acceleration_sp = vtol.computeAccelerationSetpointDuringTransition(); Eigen::Vector3f velocity_sp{NAN, NAN, 0.f}; _trajectory_setpoint->update(velocity_sp, acceleration_sp); // Send FwLateralLongitudinalSetpointType with lateral input to realign vehicle as desired float course_sp = 0.F; // North _fw_lateral_longitudinal_setpoint->updateWithAltitude(NAN, course_sp)This will ensure that the transition is handled properly within PX4. You can optionally pass a deceleration setpoint to
computeAccelerationSetpointDuringTransition()to be used during back-transitions.
To check the current state of the vehicle, use the getCurrentState() method on your px4_ros2::VTOL object.
See this external flight mode implementation for a practical example on how to use this API.
Керування незалежним клапаном/сервоприводом
Якщо ви хочете керувати незалежним клапаном (сервоприводом), дотримуйтесь цих кроків:
- Configure the output.
- Створіть екземпляр px4_ros2::PeripheralActuatorControls у конструкторі вашого режиму.
- Викличте метод set(), щоб керувати клапаном(-ами). Це може бути зроблено незалежно від будь-яких активних встановлень.
Телеметрія
Ви можете отримати доступ до телеметрії PX4 безпосередньо через наступні класи:
- OdometryGlobalPosition: Global position
- OdometryLocalPosition: Local position, velocity, acceleration, and heading
- OdometryAttitude: Vehicle attitude
- OdometryAirspeed: Airspeed
Наприклад, ви можете надати запит на поточну позицію автомобіля наступним чином:
std::shared_ptr<px4_ros2::OdometryLocalPosition> _vehicle_local_position;
...
// Get vehicle's last local position
_vehicle_local_position->positionNed();
// Check last horizontal position is valid
_vehicle_local_position->positionXYValid();INFO
Ці теми надають обгортку навколо внутрішніх тем PX4, що дозволяє бібліотеці підтримувати сумісність у випадку зміни внутрішніх тем. Перевірте px4_ros2/odometry для нових тем, і, звісно, ви можете використовувати будь-яку тему ROS 2, опубліковану з PX4.
Аварійні вимкнення та вимоги до режимів
Кожен режим має набір прапорців вимог. Ці прапорці, як правило, автоматично встановлюються в залежності від об'єктів, які використовуються в контексті режиму. Наприклад, коли додається керування вручну за допомогою коду нижче, прапорець вимог для керування вручну встановлюється:
_manual_control_input = std::make_shared<px4_ros2::ManualControlInput>(*this);Зокрема, встановлення прапорця має наступні наслідки в PX4, якщо умова не виконується:
- Озброєння неможливе, коли вибрано режим
- коли вже озброєний, режим не можна вибрати
- коли озброєний і обраний режим, відповідний аварійний режим спрацьовує (наприклад, втрата RC для вимоги до керування вручну). Перевірте сторінку безпеки, щоб налаштувати безпечну поведінку. Аварійний режим також спрацьовує, коли режим аварійно завершується або стає несприйнятливим, коли він обраний.
Ось відповідна блок-схема для прапорця керування вручну:
Можна вручну оновити будь-які вимоги до режиму після реєстрації.
modeRequirements().home_position = true;Повний список флагів може бути знайдений у requirement_flags.hpp.
Відкладення аварійних режимів
Режим або режим виконавця може тимчасово відкласти неістотні збої, викликаючи метод deferFailsafesSync().
Переглянте integration test for an example.
Призначення режиму для RC-перемикача або дії джойстика
Зовнішні режими можуть бути призначені на RC перемикачі або дії джойстика. При призначенні режиму для RC-перемикача вам потрібно знати індекс (тому що параметри метаданих не містять динамічне ім'я режиму). Використовуйте статус commander , коли режим запущено, щоб отримати цю інформацію.
Наприклад:
INFO [commander] External Mode 1: nav_state: 23, name: My Manual Modeозначає, що ви б обрали Зовнішній режим 1 в QGC:
INFO
PX4 забезпечує, що певний режим завжди призначається тому ж індексу, зберігаючи хеш назви режиму. This makes it independent of startup ordering in case of multiple external modes.
Заміна внутрішнього режиму
Зовнішній режим може замінити існуючий внутрішній режим, наприклад, режим Повернення (RTL). При цьому кожного разу, коли вибирається RTL (через користувача або ситуацію аварійного виклику), замість внутрішнього режиму використовується зовнішній. Внутрішній режим використовується лише як резервний випадок. Внутрішній режим використовується лише як резервний випадок, коли зовнішній стає недоступним або відмовляє.
Замінений режим можна встановити в налаштуваннях конструктора ModeBase:
Settings{kName, false, ModeBase::kModeIDRtl}