Аналіз журналу за допомогою PlotJuggler
PlotJuggler can be used to analyze ULogs for in-depth, development purposes. Це надзвичайно корисно, оскільки кожна тема uORB відкрита / може бути побудована на графіку, а також має власні функції для зміни даних (наприклад, зі значень кватерніону на Крен / Тангаж / Риштування).
Встановлення
You can find the latest releases of the Plot Juggler here.
Примітки щодо розподілу Windows
Остання версія PlotJuggler для Windows може не працювати. In this case fallback to v2.8.4 here (this is known to work with Windows).
Примітки про AppImage для дистрибутивів Linux
Якщо завантажений AppImage не відкривається, можливо, вам потрібно змінити його налаштування доступу. Це робиться в терміналі за допомогою наступної команди:
sh
chmod 777 <Path-To-PlotJuggler-AppImage>Загальне використання
Два найпоширеніші завдання - "Пошук" залогованої теми уORB та "Перетягування та Відпускання" поля в певну тему на графічний вигляд. Це показано на діаграмі нижче.

Розбиття по горизонталі / вертикалі: Багатопанельний
Одна з найбільш потужних функцій - розділення екрану у горизонтальному або вертикальному положенні та відображення різних графіків одночасно (з синхронізованою панеллю часу зверху, якщо переміщуєте курсор часу внизу).
Це показано на анімації нижче:
In this example, vehicle_local_position topic's ax, ay and az (Acceleration estimate) components were graphed first by splitting the screen in 3 sections. Then, the vz (Velocity estimate) component was added under right pane, and finally battery_status topic's current_a (Battery current) was graphed in the lower-mid pane.
Хоча спочатку це не очевидно, ви можете помітити, що кожного разу, коли автомобіль починає рухатися (значення поточного заряду батареї зростає), значення прискорення та швидкості також починають змінюватися. Це тому, що всі дані відображаються як часова послідовність, яка показує кожне значення на певному міткостемпу.
Це корисно для отримання загального уявлення про те, що сталося і чому. Часто важко вирішувати проблеми, просто глянувши на один графік, але якщо відображені кілька графіків, набагато легше зрозуміти, що відбувалося в системі.
Відображення даних у 2D
Іншою потужною функцією є можливість відображення 2D даних на площині XY (кожні дані на вісі X, Y) у вигляді діаграми розсіювання. This is done by selecting two data points by holding Ctrl key while selecting each of them (e.g. vehicle_local_position topic's x and y components), and drag & dropping it with the Right mouse cursor pressed.
In this example, the estimated vehicle's position in local coordinate frame is graphed onto a XY-plane which shows a 2D view of the estimated position, and the vx and vy components (Velocity estimate) are graphed on the right, with the vz (Vertical velocity estimate) graphed underneath it in a split view.
Це в свою чергу показує взаємозв'язок між позицією та швидкістю руху транспортного засобу інтуїтивно. For example, note how when the vehicle moves in the X-axis direction, the vx value goes high, and as the vehicle turns to the Y-axis direction, the vy value starts to change as well.
Використання кнопки 'Play'
Here the Play button is used to play the recorded data in real time (speed factor can be adjusted in the lower-right corner). Це показує детально зв'язок позиції / швидкості, описаний вище.
INFO
Try out the boat testing log analysis yourself by downloading the ULog and Layout file used above!
Шаблони макетів
Існує кілька файлів розташування PlotJuggler, якими діляться розробники PX4. Кожен може бути використаний для конкретної мети (настройка багтрекера, настройка VTOL, налагодження човна і т. Д.):
- Sample View layout : Template used in the Multi-panel example above.
Розширене використання
Створення власних часових рядів за допомогою LUA скрипта
Plot Juggler підтримує використання LUA скриптів для обробки та відображення даних. Це потужна функція, яка може робити такі речі, як інтегрування кривої, усереднювання двох кривих, видалення зміщень та інше.
Розрахунок кута крену/тангажу/риск з кватеріону
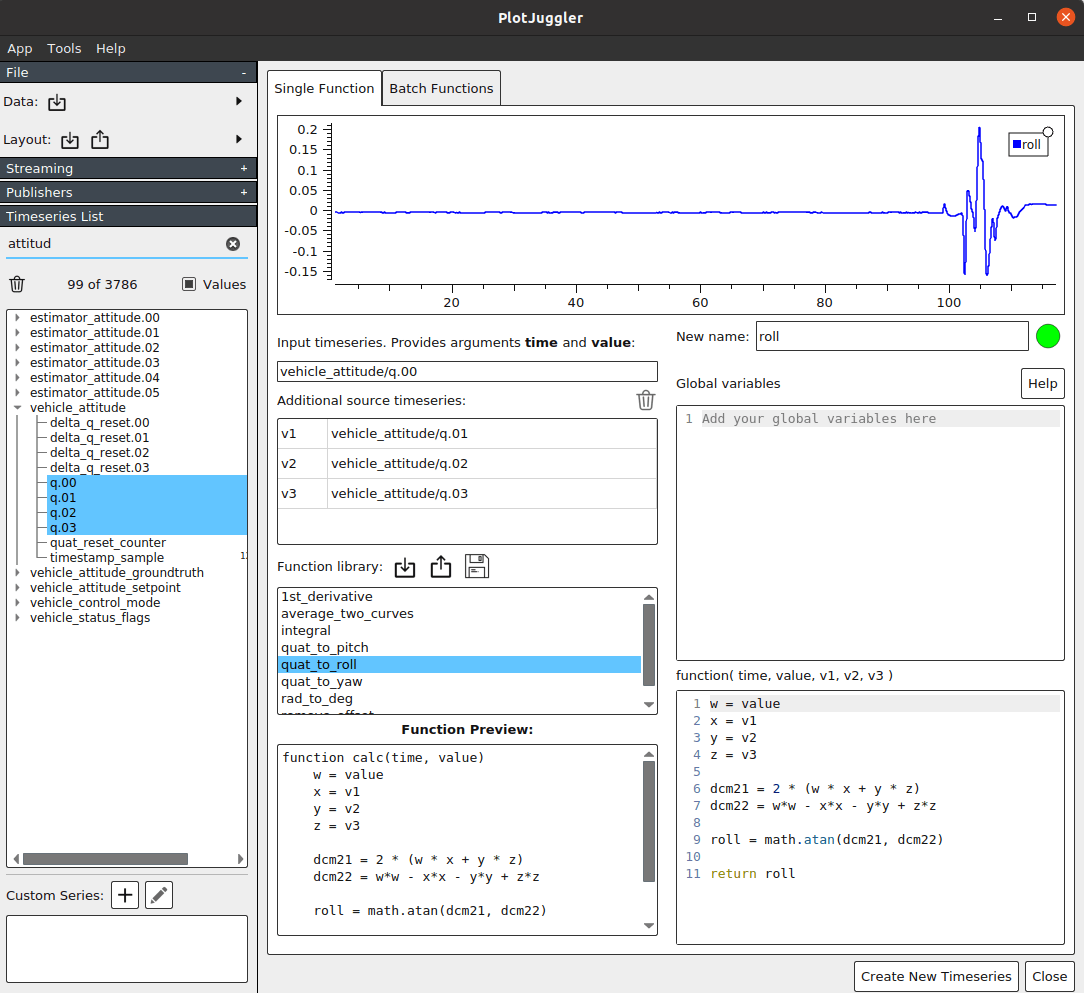
To know vehicle's attitude, PX4 logs the estimated attitude's quaternion in the vehicle_attitude topic in an array of floating point values (q[4]). Since these values don't give contextual information (e.g. roll), it needs a transformation involving trigonometric functions.
- Search for
vehicle_attitudetopic in Timeseries List panel on the left - Select 4 quaternion members (
q.00, q.01, q.02, q.03) by clickingq.00first, then holding Shift + clickingq.03. Вони всі повинні бути вибрані - Клацніть на символ '+' у нижньому лівому розділі 'Користувацькі серії', щоб створити нову серію
- Виберіть ще 4 члени кватерніона та перетягніть їх на вкладку 'Вхідний часовий ряд + Додатковий джереловий часовий ряд' у верхньому лівому куті
- Double click on the
quat_to_rollfrom the Function Library. Тепер ви маєте сюжет на верхній секції - Assign the name for the plot (e.g.
roll) in the text box in upper-right corner - Клацніть 'Створити нову часову послідовність'. Тепер ви маєте сюжет у 'Спеціальній серії'
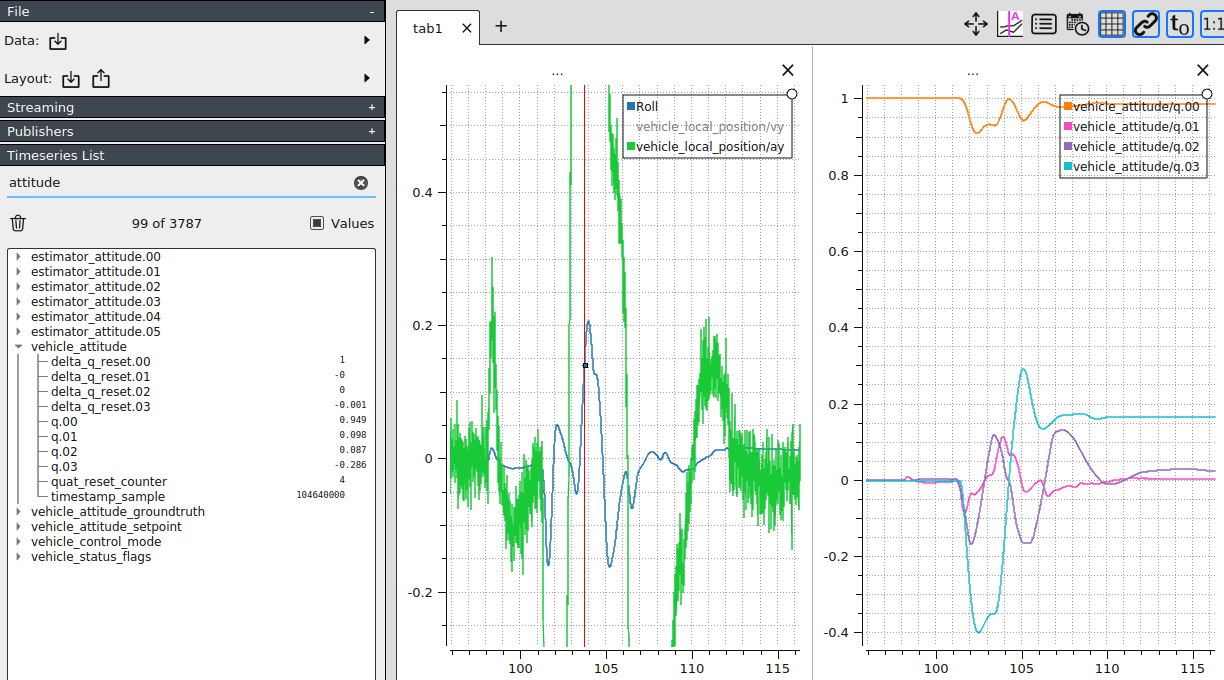
Here the custom series Roll is displayed along with other timeseries, including it's original form in Quaternion on the right, which is not human-readable (using PlotJuggler 3.5.0):
The quat_to_roll function looks like this:
lua
w = value
x = v1
y = v2
z = v3
dcm21 = 2 * (w * x + y * z)
dcm22 = w*w - x*x - y*y + z*z
roll = math.atan(dcm21, dcm22)
return roll