Швидкий старт з підключенням Pixracer
WARNING
PX4 не розробляє цей (або будь-який інший) автопілот. Contact the manufacturer for hardware support or compliance issues.
WARNING
Under construction
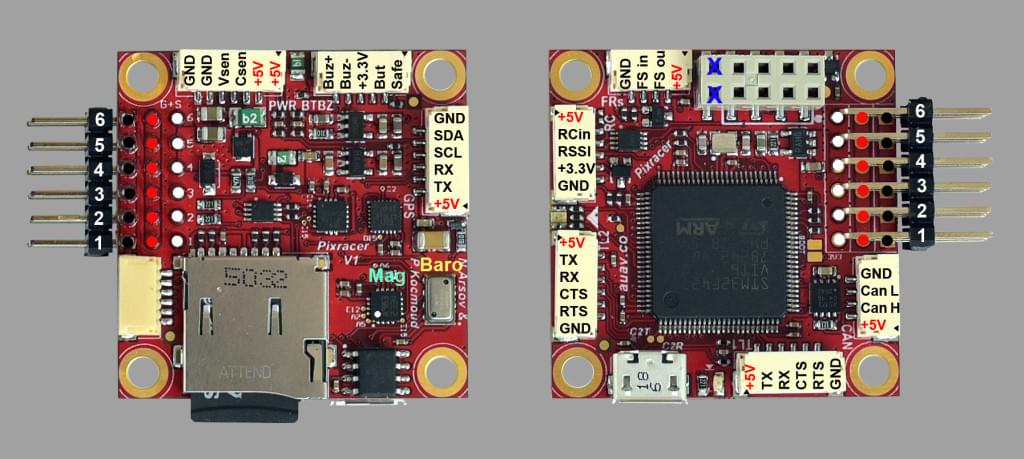
This quick start guide shows how to power the Pixracer flight controller and connect its most important peripherals.

Посібники з підключення/монтажу
Основне Налаштування
Радіо/Дистанційне Управління
Для того щоб керувати транспортним засобом вручну, потрібна система радіоуправління (RC) (PX4 не потребує системи радіоуправління для автономних режимів польоту).
Вам потрібно вибрати сумісний передавач/приймач і зв'язати їх таким чином, щоб вони взаємодіяли (ознайомтеся з інструкціями, що додаються до вашого конкретного передавача/приймача).
Нижче наведено інструкції з підключення різних типів приймачів:
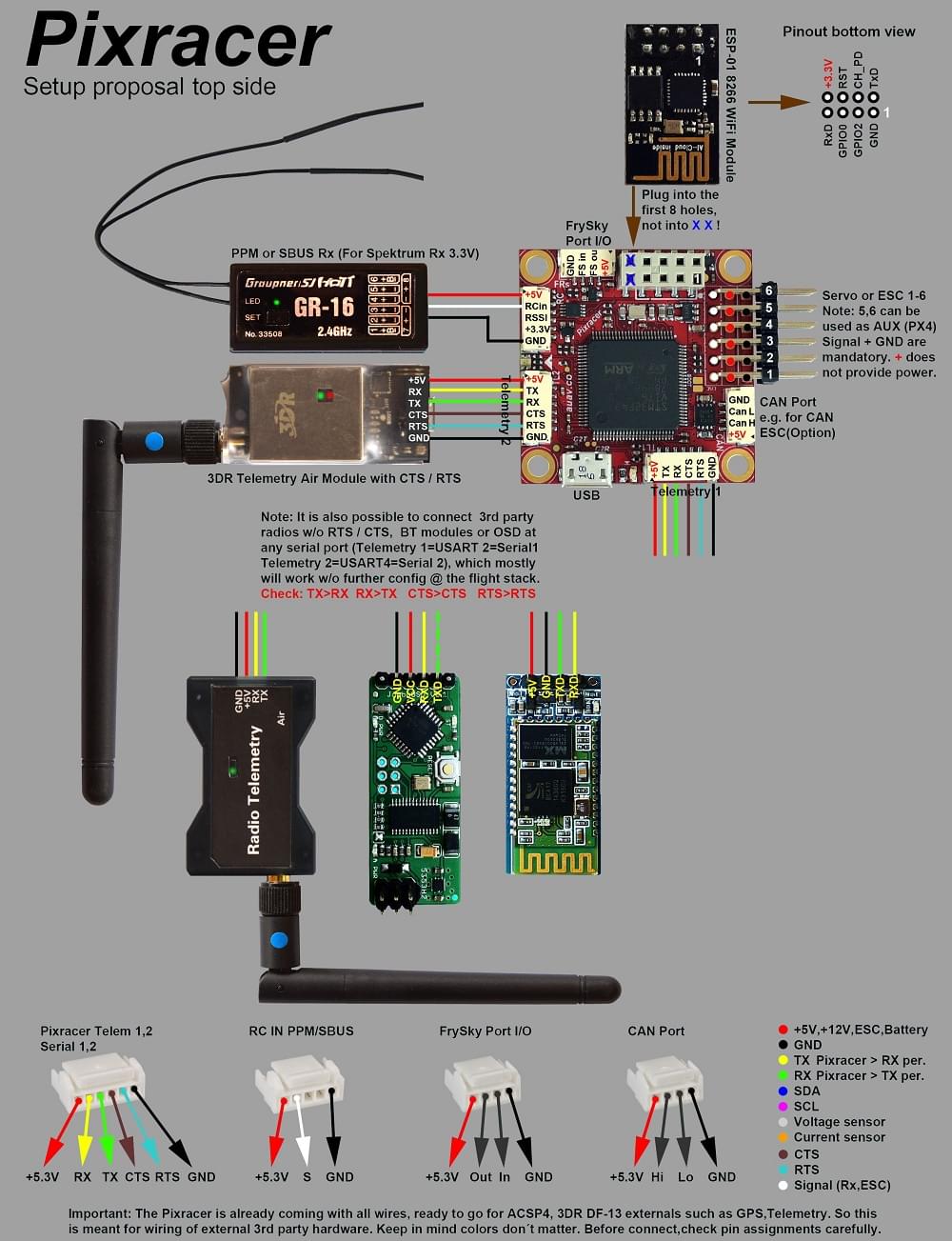
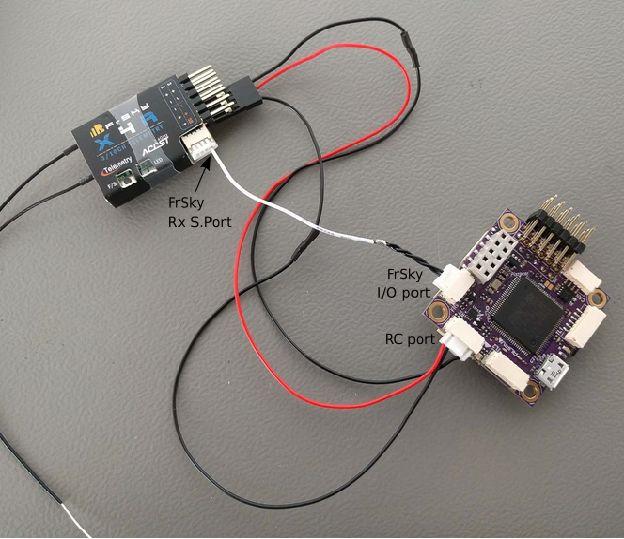
Приймачі FrSky підключаються через показаний порт і можуть використовувати наданий роз'єм введення/виведення.

PPM-SUM and S.BUS receivers connect to the RCIN port.
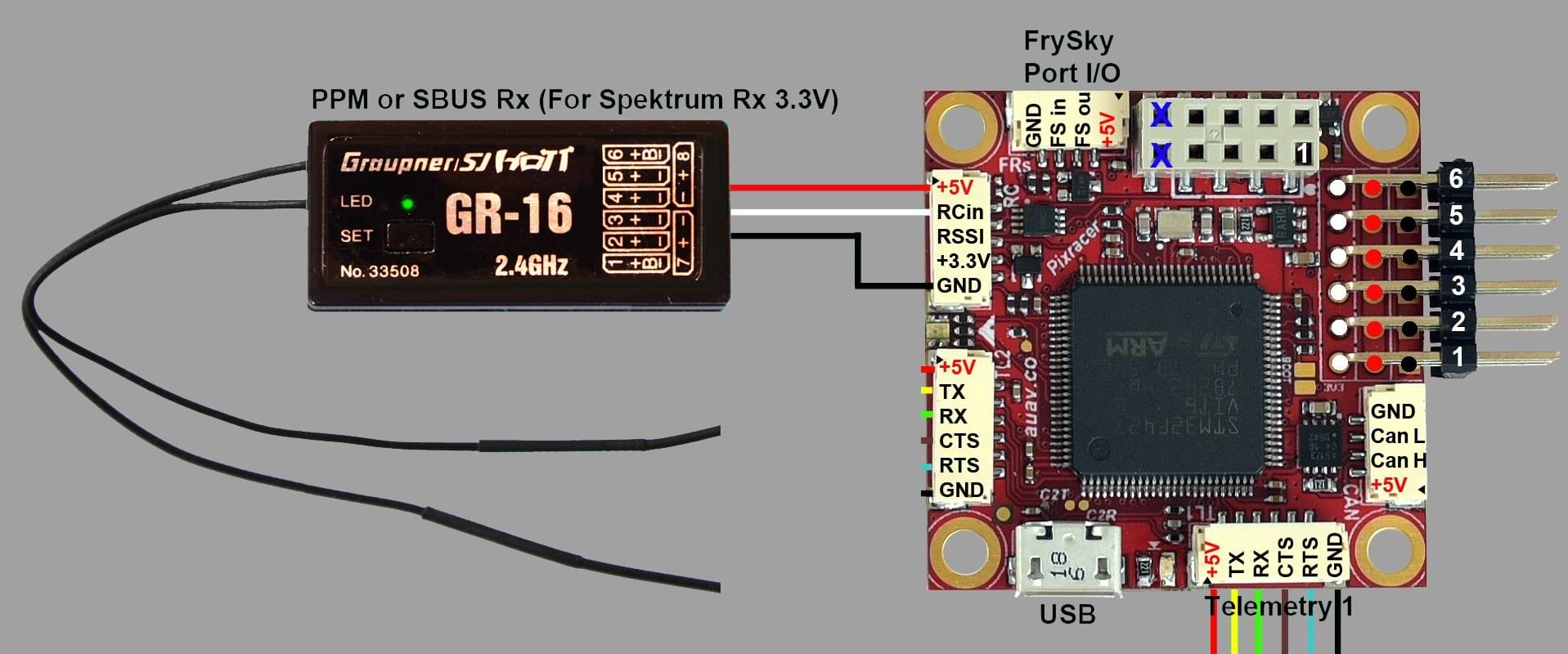
PPM and PWM receivers that have an individual wire for each channel must connect to the RCIN port via a PPM encoder like this one (PPM-Sum receivers use a single signal wire for all channels).
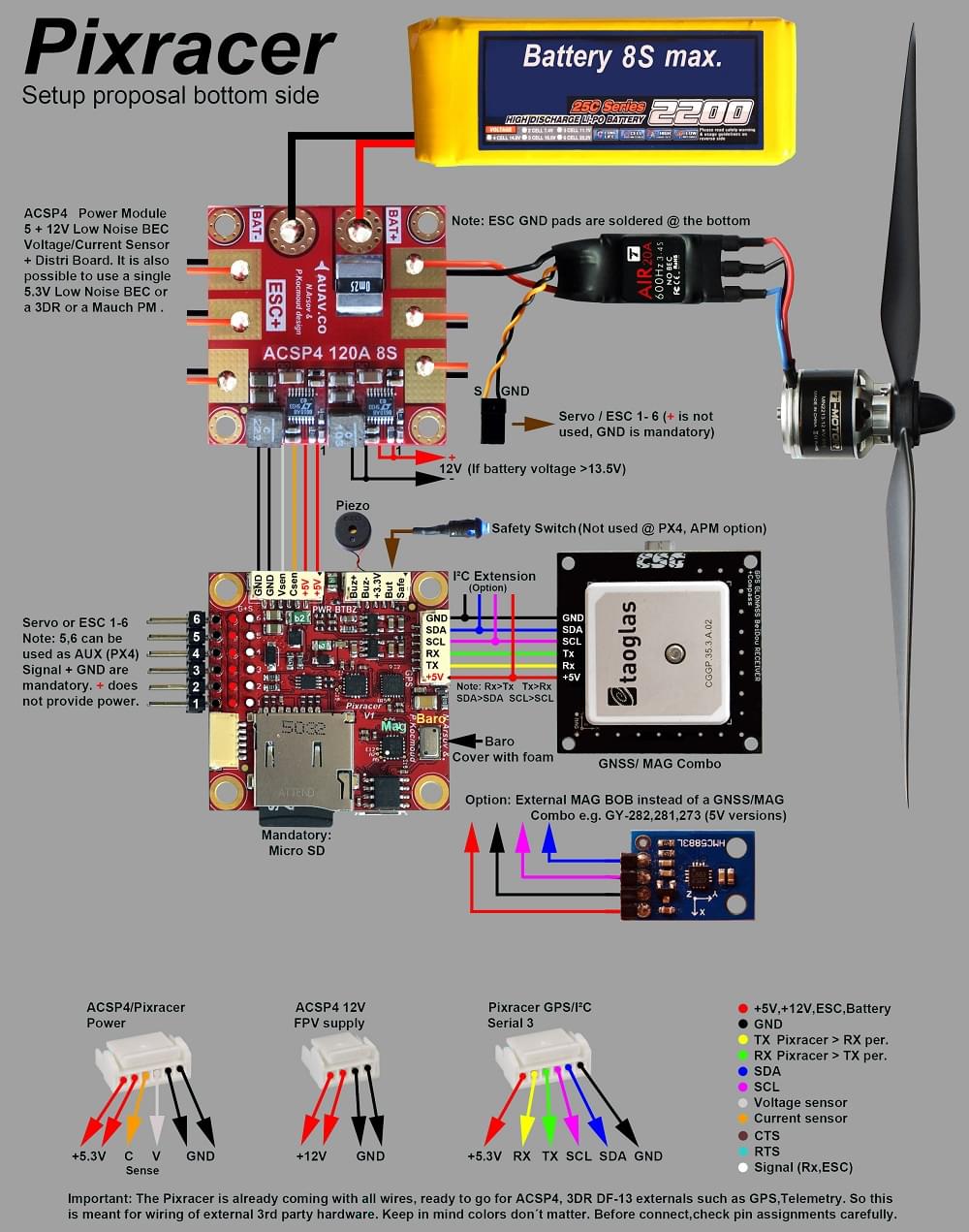
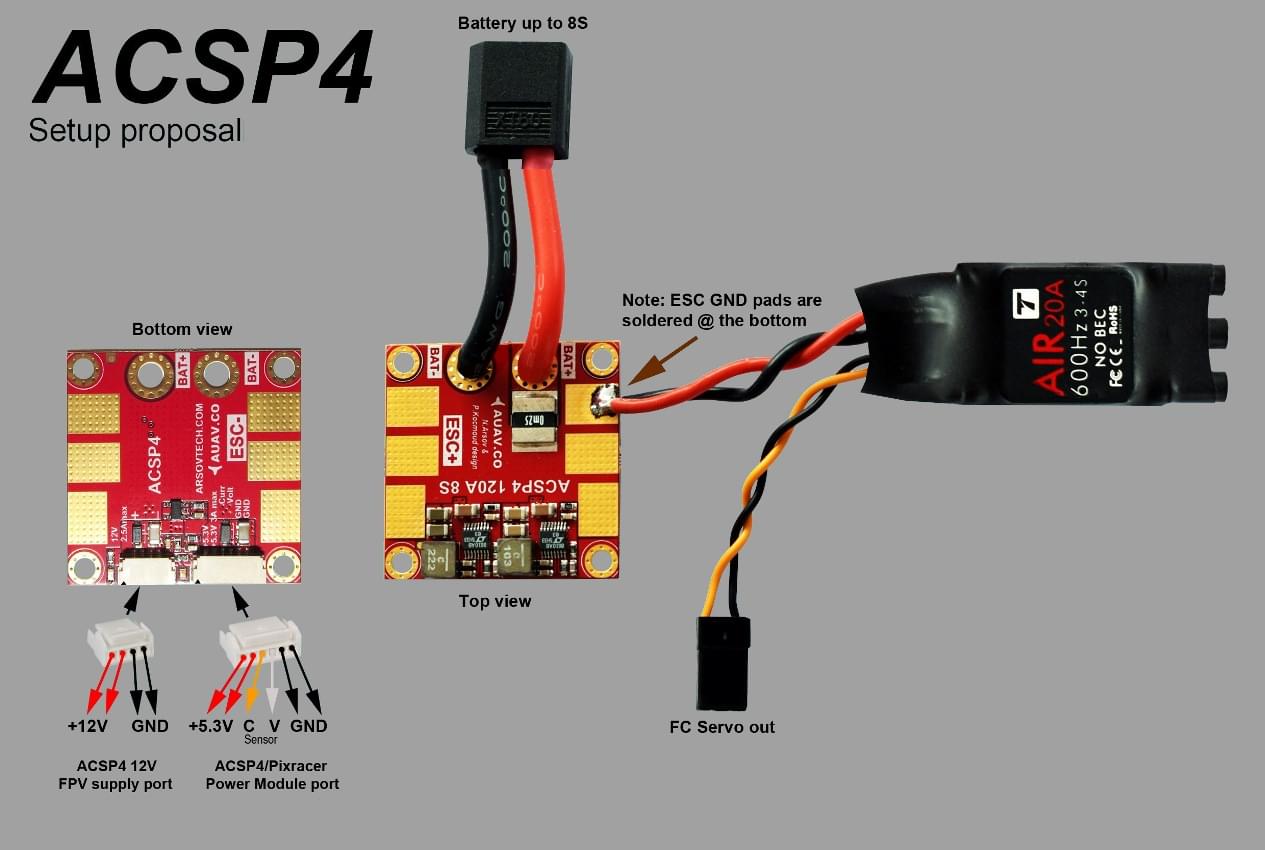
Модуль потужності (ACSP4)
Зовнішня телеметрія
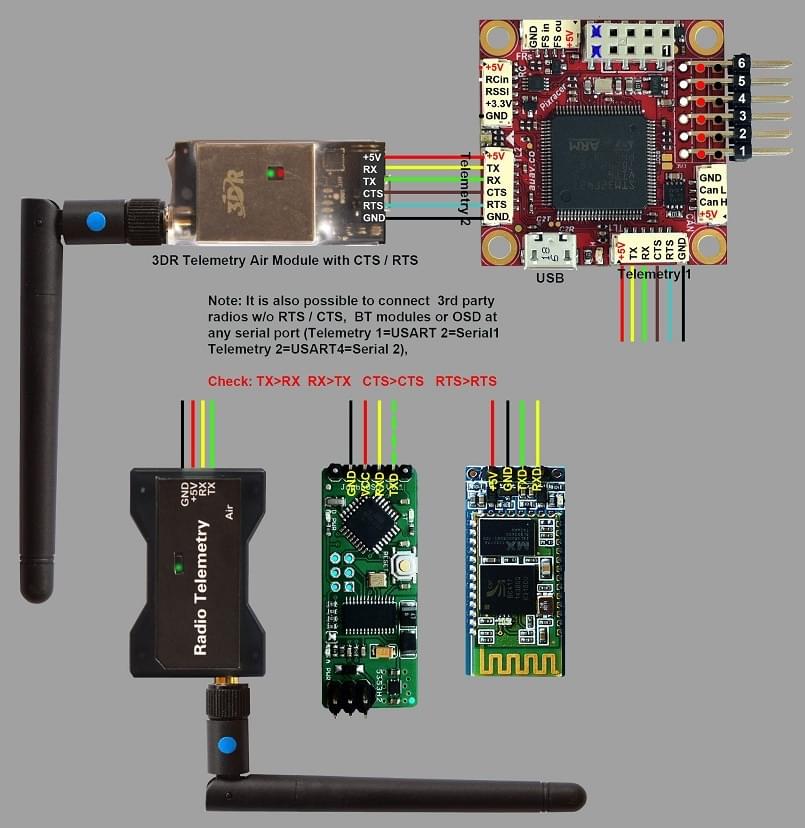
Pixracer has inbuilt WiFi, but also supports telemetry via external Wi-Fi or radio telemetry modules connected to the TELEM1 or TELEM2 ports. Це показано на схемі підключення нижче.
INFO
The TELEM2 port must be configured as a second MAVLink instance using the MAV_2_CONFIG parameter. For more information see MAVLink Peripherals > MAVLink Instances (and Serial Port Configuration).