Holybro DroneCAN M8N GPS
Holybro DroneCAN GPS має модуль UBLOX M8N, компас BMM150, триколірний індикатор світлодіодів.
The GPS module uses the DroneCAN protocol for communication. З'єднання DroneCAN менше чутливі до електромагнітних перешкод порівняно з послідовним з'єднанням, що робить його більш надійним. Крім того, використання DroneCAN означає, що GPS та компас не займають жодних портів послідовного керування польотом (різні/додаткові пристрої CAN можна підключити до того ж шини CAN за допомогою плати розгалужувача CAN).

Де купити
Замовте цей модуль з:
Характеристики обладнання
| DroneCAN M8N | |
|---|---|
| Приймач GNSS | Ublox NEO M8N |
| Кількість одночасних GNSS | 2 (Стандартний GPS + GLONASS) |
| Процесор | STM32G4 (170MHz, 512K FLASH) |
| Компас | BMM150 |
| Смуга частот | GPS: L1C/A |
| Система розширення GNSS | SBAS: WAAS, EGNOS, MSAS, QZSS |
| Оновлення навігації | 5Гц За замовчуванням (10Гц МАКС) |
| Чутливість навігації | –167 dBm |
| Холодний запуск | ~ 26s |
| Точність | 2.5m |
| Точність швидкості | 0.05 m/s |
| Макс. # супутників | 22+ |
| Швидкість передачі даних по CAN BUS за замовчуванням | 1MHz |
| Протокол зв'язку | DroneCAN @ 1 Mbit/s |
| Підтримує автопілот FW | PX4, Ardupilot |
| Тип порту | GHR-04V-S |
| Антена | 25 x 25 x 4 мм керамічна патч-антена |
| Напруга | 4.7-5.2V |
| Споживання електроенергії | Менше ніж 200мА @ 5В |
| Температура | -40~80C |
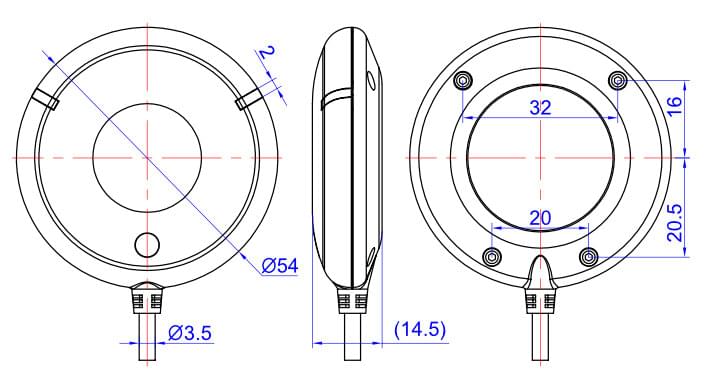
| Розмір | Diameter: 54mm |
| Вага | 36g |
| Довжина кабелю | 26cm |
| Інше |
|
Налаштування програмного забезпечення
Встановлення
The recommended mounting orientation is with the arrow on the GPS pointing towards the front of vehicle.
The sensor can be mounted anywhere on the frame, but you will need to specify its position, relative to vehicle centre of gravity, during PX4 configuration.
Підключення
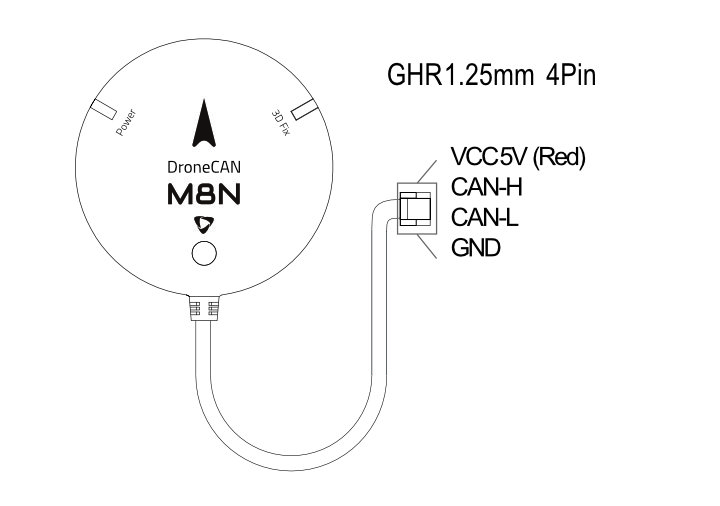
The Holybro DroneCAN GPS підключений до шини CAN за допомогою стандартного кабелю Pixhawk 4 pin JST GH. For more information, refer to the CAN Wiring instructions.
Схема розташування виводів
Розміри
Конфігурація PX4
You need to set necessary DroneCAN parameters and define offsets if the sensor is not centred within the vehicle. Необхідні налаштування наведено нижче.
INFO
The GPS will not boot if there is no SD card in the flight controller when powered on.
Увімкнути DroneCAN
In order to use the ARK GPS board, connect it to the Pixhawk CAN bus and enable the DroneCAN driver by setting parameter UAVCAN_ENABLE to 2 for dynamic node allocation (or 3 if using DroneCAN ESCs).
Кроки наступні:
- In QGroundControl set the parameter UAVCAN_ENABLE to
2or3and reboot (see Finding/Updating Parameters). - Підключіть GPS CAN до шини CAN Pixhawk.
Після активації модуль буде виявлено при завантаженні. Дані GPS повинні надходити з частотою 5 Гц.
DroneCAN configuration in PX4 is explained in more detail in DroneCAN > Enabling DroneCAN.
Конфігурація позиції датчика
Якщо датчик не знаходиться у центрі пристрою, вам також потрібно буде визначити зміщення датчика:
- Enable GPS yaw fusion by setting bit 3 of EKF2_GPS_CTRL to true.
- Enable UAVCAN_SUB_GPS, UAVCAN_SUB_MAG, and UAVCAN_SUB_BARO.
- Set CANNODE_TERM to
1if this is that last node on the CAN bus. - The parameters SENS_GPS0_OFFX, SENS_GPS0_OFFY and SENS_GPS0_OFFZ can be set to account for the offset of the ARK GPS from the vehicles centre of gravity.