RadiolinkPIX6 Flight Controller
PX4 v1.17WARNING
PX4 не розробляє цей (або будь-який інший) автопілот. Contact the manufacturer for hardware support or compliance issues.
Автопілот рекомендується для комерційної системної інтеграції, але також підходить для академічних досліджень і будь-якого іншого використання.

The Radiolink PIX6 is a high-performance flight controller. Featuring STM32F7 CPU, vibration isolation of IMUs, redundant IMUs, integrated OSD chip, IMU heating, and DShot.
INFO
This flight controller is manufacturer supported.
Короткий опис
- Процесор
- 32-bit ARM Cortex M7 core with DPFPU - STM32F765VIT6
- 216 MHz/512 KB RAM/2 MB Flash
- 32-bit IOMCU co-processor - STM32F100
- 32KB FRAM - FM25V02A
- AT7456E OSD
- Датчики
- Bosch BMI088 IMU (accel, gyro)
- InvenSense ICM-42688 IMU (accel, gyro)
- SPA06 barometer
- IST8310 magnetometer
- Power
- SMBUS/I2C Power Module Inputs (I2C)
- voltage and current monitor inputs (Analog)
- Інтерфейси
- 16 PWM Outputs with independent power rail for external power source
- 5x UART serial ports, 2 with HW flow control
- Camera Input and Video Output
- PPM/SBUS input, DSM/SBUS input
- Вхід RSSI (ШІМ або напруга)
- I2C, SPI, 2x CAN, USB
- 3.3V and 6.6V ADC inputs
- Звуковий сигнал і захисний вимикач
- microSD card
- Вага та розміри:
- Weight 80g
- Size 94mm x 51.5mm x 14.5mm
Where to Buy
Radiolink Amazon(International users)
Radiolink Taobao(China Mainland user)
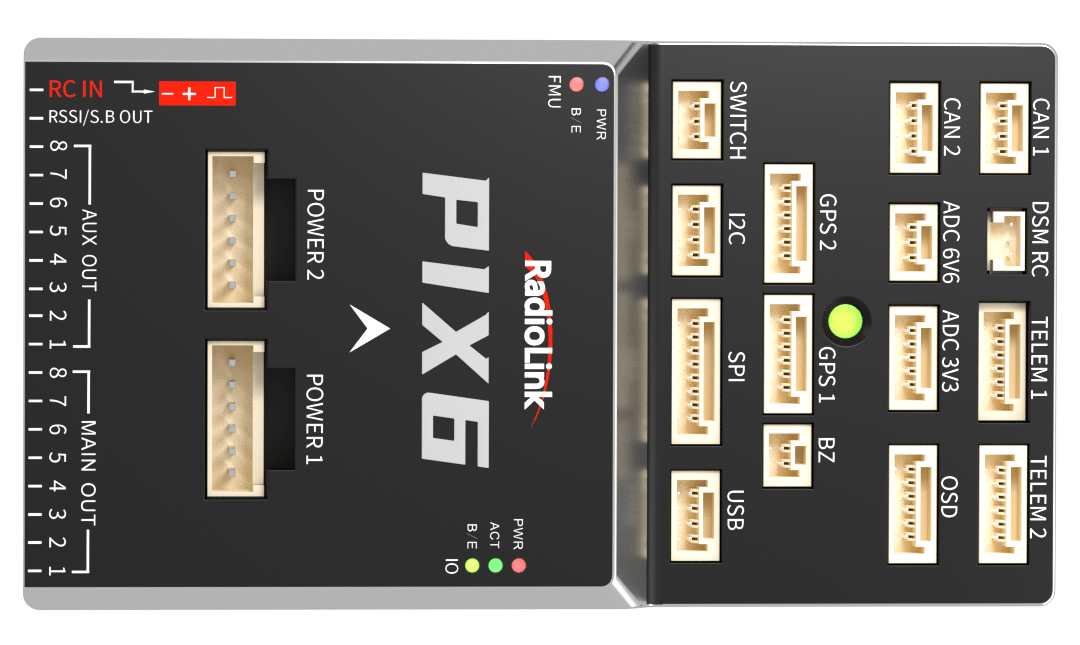
Призначення конекторів
Top View
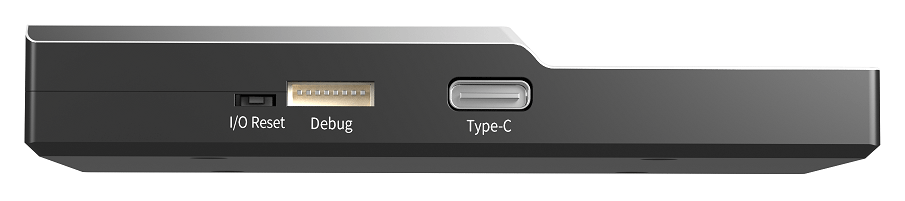
Left View

Right View
Rear View
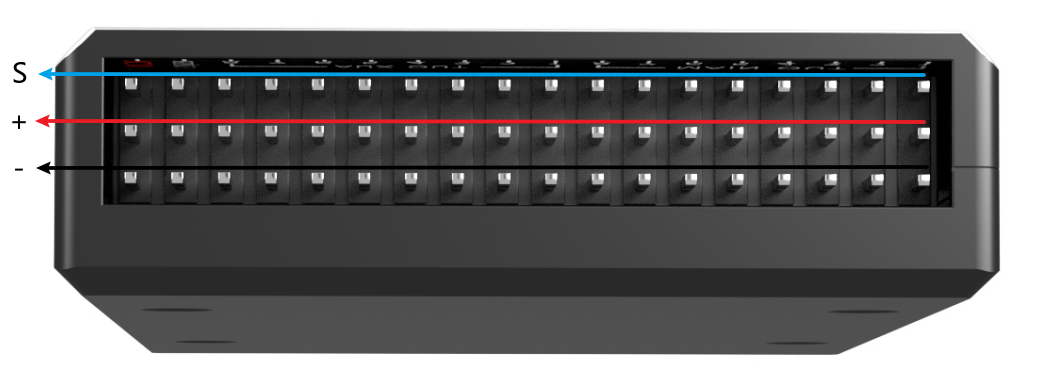
Схема розташування виводів
Якщо не вказано інше, всі конектори - це JST GH.
TELEM1, TELEM2 порти
| Pin | Сигнал | Вольтаж |
|---|---|---|
| 1 | VCC | +5V |
| 2 | TX(OUT) | +3.3V |
| 3 | RX(IN) | +3.3V |
| 4 | CTS | +3.3V |
| 5 | RTS | +3.3V |
| 6 | GND | GND |
OSD
| Pin | Сигнал | Вольтаж |
|---|---|---|
| 1 | GND | GND |
| 2 | VOUT | +3.3V |
| 3 | VCC | +5V |
| 4 | GND | GND |
| 5 | VCC | +5V |
| 6 | VIN | +3.3V |
I2C port
| Pin | Сигнал | Вольтаж |
|---|---|---|
| 1 | VCC | +5V |
| 2 | SCL | +3.3V (pullups) |
| 3 | SDA | +3.3V (pullups) |
| 4 | GND | GND |
CAN1, CAN2 ports
| Pin | Сигнал | Вольтаж |
|---|---|---|
| 1 | VCC | +5V |
| 2 | CAN_H | +12V |
| 3 | CAN_L | +12V |
| 4 | GND | GND |
GPS1 порт
| Pin | Сигнал | Вольтаж |
|---|---|---|
| 1 | VCC | +5V |
| 2 | TX(OUT) | +3.3V |
| 3 | RX(IN) | +3.3V |
| 4 | SCL | +3.3V |
| 5 | SDA | +3.3V |
| 6 | GND | GND |
GPS2 Port
| Pin | Сигнал | Вольтаж |
|---|---|---|
| 1 | VCC | +5V |
| 2 | TX(OUT) | +3.3V |
| 3 | RX(IN) | +3.3V |
| 4 | SCL | +3.3V |
| 5 | SDA | +3.3V |
| 6 | GND | GND |
SPI
| Pin | Сигнал | Вольтаж |
|---|---|---|
| 1 | VCC | +5V |
| 2 | SPI_SCK | +3.3V |
| 3 | SPI_MISO | +3.3V |
| 4 | SPI_MOSI | +3.3V |
| 5 | !SPI_NSS1 | +3.3V |
| 6 | !SPI_NSS2 | +3.3V |
| 7 | DRDY | +3.3V |
| 8 | GND | GND |
POWER1 (HY2.0-6P)
Port for analog power monitors.
| Pin | Сигнал | Вольтаж |
|---|---|---|
| 1 | VCC | +5V |
| 2 | VCC | +5V |
| 3 | CURRENT | до +3.3V |
| 4 | VOLTAGE | до +3.3V |
| 5 | GND | GND |
| 6 | GND | GND |
POWER2 (HY2.0-6P)
Port for digital (I2C) power monitor.
| Pin | Сигнал | Вольтаж |
|---|---|---|
| 1 | VCC | +5V |
| 2 | VCC | +5V |
| 3 | SCL | +3.3V |
| 4 | SDA | +3.3V |
| 5 | GND | GND |
| 6 | GND | GND |
ADC 3.3V
| Pin | Сигнал | Вольтаж |
|---|---|---|
| 1 | VCC | +5V |
| 2 | ADC IN1 | до +3.3V |
| 3 | GND | GND |
| 4 | ADC IN2 | up to +3.3v |
| 5 | GND | GND |
ADC 6.6V
| Pin | Сигнал | Вольтаж |
|---|---|---|
| 1 | VCC | +5V |
| 2 | ADC IN | up to 6.6V |
| 3 | GND | GND |
USB remote port
| Pin | Сигнал | Вольтаж |
|---|---|---|
| 1 | USB VDD | +5V |
| 2 | DM | +3.3V |
| 3 | DP | +3.3V |
| 4 | GND | GND |
SWITCH
| Pin | Сигнал | Вольтаж |
|---|---|---|
| 1 | VCC | +3.3V |
| 2 | !IO_LED_SAFETY | GND |
| 3 | SAFETY | GND |
Buzzer port
| Pin | Сигнал | Вольтаж |
|---|---|---|
| 1 | VCC | +5V |
| 2 | BUZZER- | +5V |
Spektrum/DSM Port (PH1.25-3P)
| Pin | Сигнал | Вольтаж |
|---|---|---|
| 1 | VCC | +3.3V |
| 2 | GND | GND |
| 3 | Сигнал | +3.3V |
Debug port (SH1.0-8P)
| Pin | Сигнал | Вольтаж |
|---|---|---|
| 1 | VCC | +5V |
| 2 | FMU_SWCLK | +3.3V |
| 3 | FMU_SWDIO | +3.3V |
| 4 | TX(UART7) | +3.3V |
| 5 | RX(UART7) | +3.3V |
| 6 | IO_SWCLK | +3.3V |
| 7 | IO_SWDIO | +3.3V |
| 8 | GND | GND |
Збірка прошивки
To build PX4 for this target:
make radiolink_PIX6_defaultВстановлення прошивки PX4
Прошивку можна встановити будь-якими звичайними способами:
Збудуйте та завантажте джерело
shmake radiolink_PIX6_default uploadLoad the firmware using QGroundControl. Ви можете використовувати або готове вбудоване програмне забезпечення, або власне користувацьке програмне забезпечення.
INFO
At time of writing the only pre-built software is
PX4 main(see Installing PX4 Main, Beta or Custom Firmware). Release builds will be supported for PX4 v1.17 and later.
:::
Конфігурація PX4
In addition to the basic configuration, the following parameters are important:
| Parameter | Налаштування |
|---|---|
| SYS_HAS_MAG | Це має бути вимкнено, оскільки у платі немає внутрішнього магніту. Ви можете активувати це, якщо приєднаєте зовнішній магніт. |
Powering the PIX6
The PIX6 has 2 dedicated power monitor ports, each with a 6 pin connector. One is the Analog power monitor (POWER1), and the other is the I2C power monitor (POWER2).
The power module that comes with the flight controller with a wide voltage input range of 2-12S (7.4-50.4V), a maximum detection current of 90A (single ESC maximum detection current is 22.5A), a BEC output voltage of 5.3±0.2V, and a BEC output current of 2A.
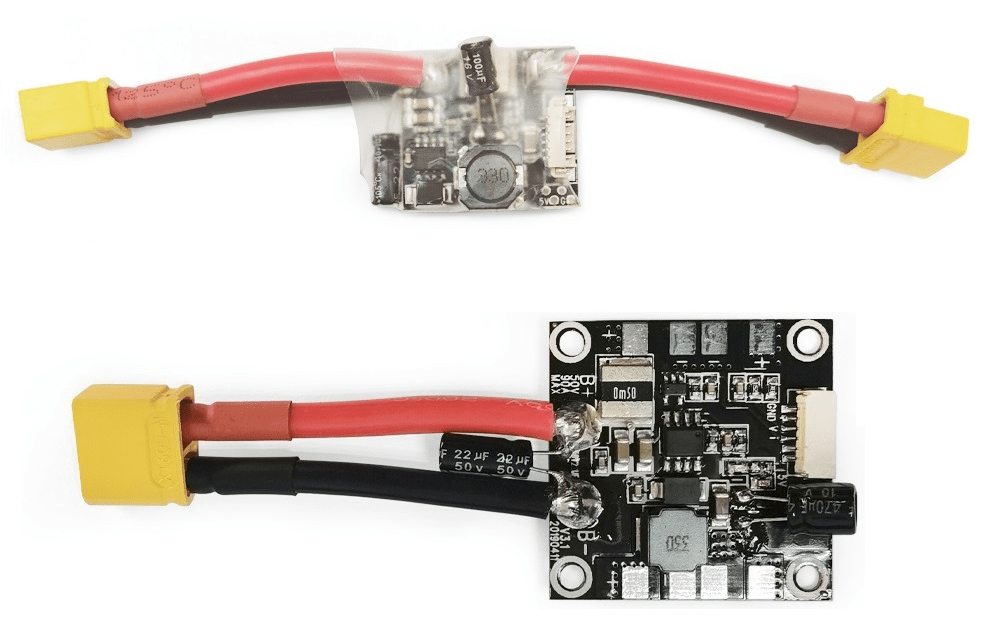
The PIX6 also supports power modules from other manufacturers, such as holybro_pm02d.
Recommended Accessories
GPS Modules
Radiolink manufactures a variety of high-performance GPS,Dual Anti-interference Technology Worry-free of UAV High-power Image Transmission, High-Voltage Lines, or Other Strong Signal Interference.
The PIX6 has 2 dedicated GPS ports, GPS1 and GPS2, each with a 6 pin connector.
Recommended modules include:
Налаштування послідовного порту
| UART | Пристрій | Порт |
|---|---|---|
| UART1 | /dev/ttyS0 | GPS1 |
| USART2 | /dev/ttyS1 | TELEM1 (керування потоком) |
| USART3 | /dev/ttyS2 | TELEM2 (керування потоком) |
| UART4 | /dev/ttyS3 | GPS2 |
| UART7 | /dev/ttyS4 | Debug Console |
| UART8 | /dev/ttyS5 | PX4IO |
Analog inputs
The Radiolink PIX6 has 3 analog inputs, one 6V tolerant and two 3.3V tolerant.
- ADC Pin12 -> ADC 6.6V Sense
- ADC Pin4 -> ADC IN1 3.3V Sense
- ADC Pin13 -> ADC IN2 3.3V Sense
Радіоуправління
A Radio Control (RC) system is required if you want to manually control your vehicle (PX4 does not require a radio system for autonomous flight modes).
Вам потрібно вибрати сумісний передавач/приймач і зв'язати їх таким чином, щоб вони взаємодіяли (ознайомтеся з інструкціями, що додаються до вашого конкретного передавача/приймача).
- Spektrum/DSM receivers connect to the DSM/SBUS RC input.
- PPM or SBUS receivers connect to the RC IN input port.
- CRSF receiver must be wired to a spare port (UART) on the Flight Controller. Then you can bind the transmitter and receiver together.
CRSF Parameter Configuration
Find and set the following parameters:
Set RC_CRSF_PRT_CFG to the port that is connected to the CRSF receiver (such as
TELEM1).This configures the serial port to use the CRSF protocol. Note that some serial ports may already have a default serial port mapping or default MAVLink serial port mapping that you will have to un-map before you can assign the port to CRSF. For example, if you want to use
TELEM1orTELEM2you first need to modify MAV_0_CONFIG or MAV_1_CONFIG to stop setting those ports.Немає потреби встановлювати швидкість передачі для порту, оскільки це налаштовано драйвером.
Enable RC_CRSF_TEL_EN to activate Crossfire telemetry.
Для отримання додаткової інформації про вибір радіосистеми, сумісність приймача та зв'язок вашої передавача/приймача, див. статтю: Пульт керування передавачів & приймачів.