RPi PilotPi Shield
WARNING
PX4 не розробляє цей (або будь-який інший) автопілот. Contact the manufacturer for hardware support or compliance issues.
The PilotPi shield is a fully functional solution to run PX4 autopilot directly on Raspberry Pi. Він розроблений як низькобюджетна, але високомасштабована платформа з постійними оновленнями як зі сторони Linux, так і PX4. Не потрібні пропрієтарні драйвери, оскільки всі компоненти мають підтримку від спільноти RPi та PX4. PCB та схема також є відкритими.
Короткий опис
- Підтримувані плати RPi:
- Raspberry Pi 2B/3B/3B+/4B
- Підтримувані ОС:
- Raspberry Pi OS
- Ubuntu Server (armhf/arm64)
- Акселерометр / Гіроскоп:
- ICM42688P
- Магнітометр:
- IST8310
- Барометр:
- MS5611
- PWM:
- PCA9685
- ADC:
- ADS1115
- Живлення:
- Акумулятор 3~6S з вбудованим вимірюванням напруги.
- Живлення Pi через кабель USB
- Availability: preparing for shipping
Підключення
Shield надає:
- 16 вихідних каналів PWM
- GPS конектор
- Конектор телеметрії
- External I2C bus connector (Note: conflicts with CSI camera)
- Вхідний порт RC (SBUS)
- 3x канали ADC діапазоном 0~5V
- 2*8 2.54 мм не використовуваний конектор GPIO
Прямий доступ з RPi:
- 4x USB конектори
- CSI connector(Note: conflict with external I2C bus)
- тощо.
Рекомендована проводка
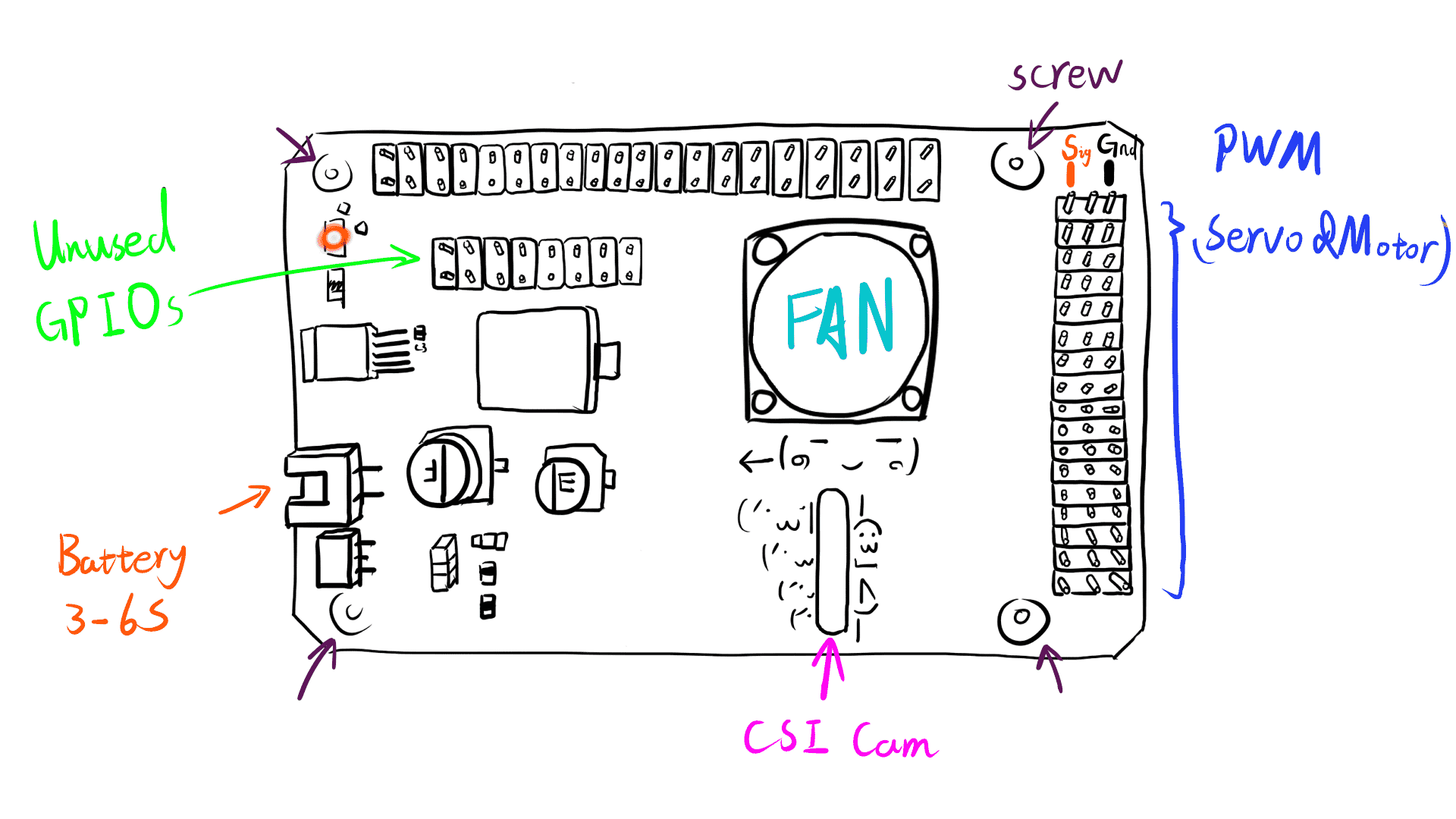
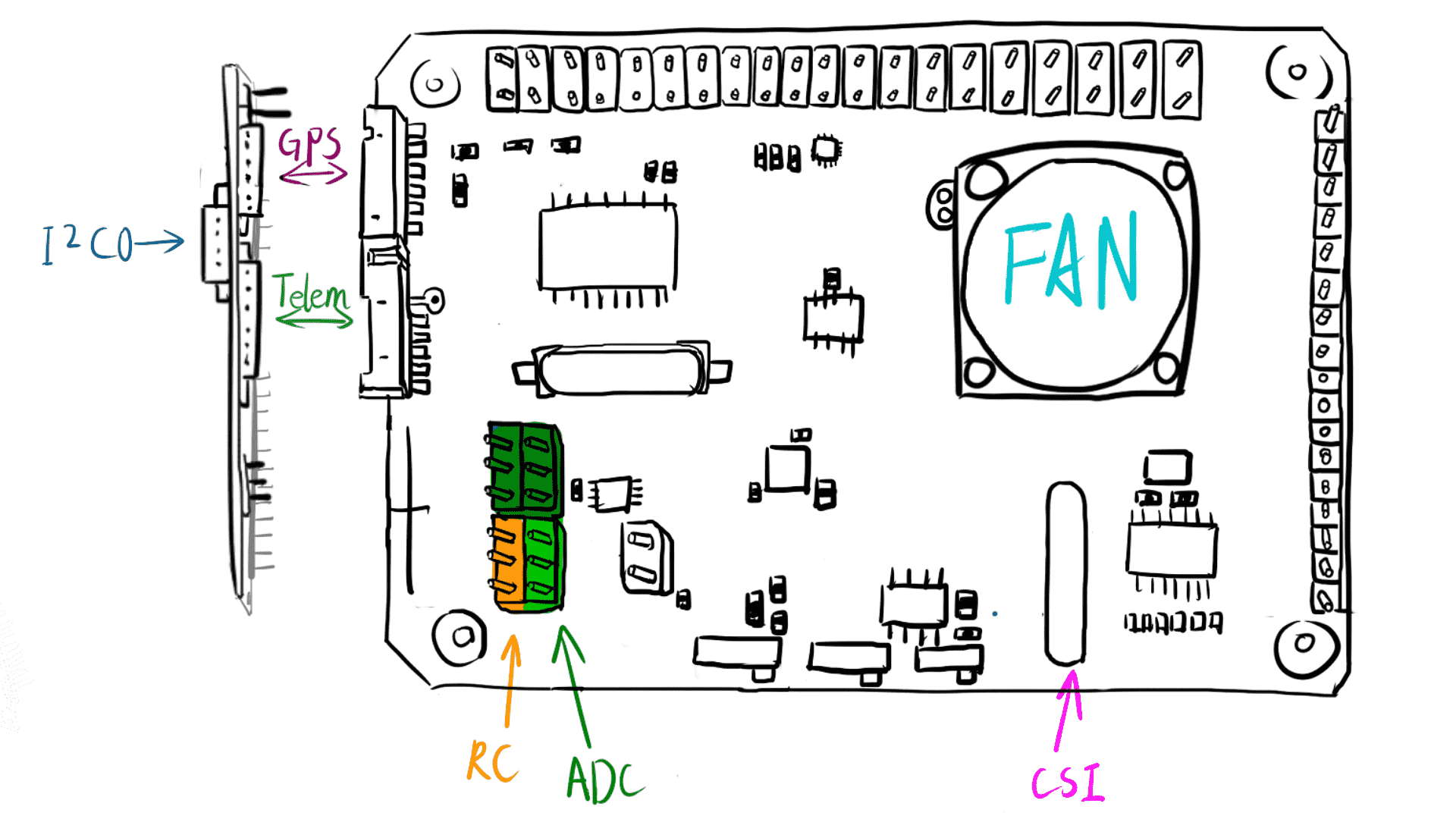
Схема розташування виводів
WARNING
It still uses old GH1.25 connectors. Wiring is compatible with Pixhawk 2.4.8
З’єднання
GPS конектор
Mapped to /dev/ttySC0
| Pin | Сигнал | Вольтаж |
|---|---|---|
| 1 | VCC | +5V |
| 2 | TX | +3v3 |
| 3 | RX | +3v3 |
| 4 | NC | +3v3 |
| 5 | NC | +3v3 |
| 6 | GND | GND |
Конектор телеметрії
Mapped to /dev/ttySC1
| Pin | Сигнал | Вольтаж |
|---|---|---|
| 1 | VCC | +5V |
| 2 | TX | +3v3 |
| 3 | RX | +3v3 |
| 4 | CTS | +3v3 |
| 5 | RTS | +3v3 |
| 6 | GND | GND |
Зовнішній I2C конектор
Mapped to /dev/i2c-0
| Pin | Сигнал | Вольтаж |
|---|---|---|
| 1 | VCC | +5V |
| 2 | SCL | +3v3(pullups) |
| 3 | SDA | +3v3(pullups) |
| 4 | GND | GND |
RC & ADC2/3/4
RC is mapped to /dev/ttyAMA0 with signal inverter switch on RX line.
| Pin | Сигнал | Вольтаж |
|---|---|---|
| 1 | RC | +3V3~+5V |
| 2 | VCC | +5V |
| 3 | GND | GND |
- ADC1 внутрішньо підключений до розподільника напруги для моніторингу напруги батареї.
- ADC2 залишається невикористаним.
- ADC3 може бути підключений до аналогового датчика швидкості.
- ADC4 має перемичку між ADC та VCC, щоб відстежувати рівень напруги системи.
| Pin | Сигнал | Вольтаж |
|---|---|---|
| 1 | ADCx | 0V~+5V |
| 2 | VCC | +5V |
| 3 | GND | GND |
INFO
ADC3 & 4 have an alternative VCC source When 'Vref' switch is on, 'VCC' pin is driven by REF5050.
Вільні GPIO доступні зверху на платі
| Shield Pin | BCM | WiringPi | RPi Pin |
|---|---|---|---|
| 1 | 3V3 | 3v3 | 3V3 |
| 2 | 5V | 5V | 5V |
| 3 | 4 | 7 | 7 |
| 4 | 14 | 15 | 8 |
| 5 | 17 | 0 | 11 |
| 6 | 27 | 2 | 13 |
| 7 | 22 | 3 | 15 |
| 8 | 23 | 4 | 16 |
| 9 | 7 | 11 | 26 |
| 10 | 5 | 21 | 29 |
| 11 | 6 | 22 | 31 |
| 12 | 12 | 26 | 32 |
| 13 | 13 | 23 | 33 |
| 14 | 16 | 27 | 36 |
| 15 | 26 | 25 | 37 |
| 16 | GND | GND | GND |
Перемикачі
RC Інвертор
This switch will decide the signal polarity of RX line: UART_RX = SW xor RC_INPUT
- On: підходить з SBUS (сигнал інвертований)
- Off: збережено
Vref
ADC 3 & 4 will have VCC driven by:
- Вихід Vref від REF5050, якщо увімкнено
- 5V пін напряму з RPi, якщо вимкнено
Режим завантаження
Цей перемикач підключений до Pin22(BCM25). Системний rc script перевірить його значення і вирішить, чи повинен PX4 запускатися разом із завантаженням системи чи ні.
- On: автоматичний запуск PX4
- Off: don't start PX4
Швидкий старт для розробника
Зверніться до інструкцій для вашої операційної системи на RPi: