BeagleBone Blue
WARNING
PX4 не розробляє цей (або будь-який інший) автопілот. Contact the manufacturer for hardware support or compliance issues.
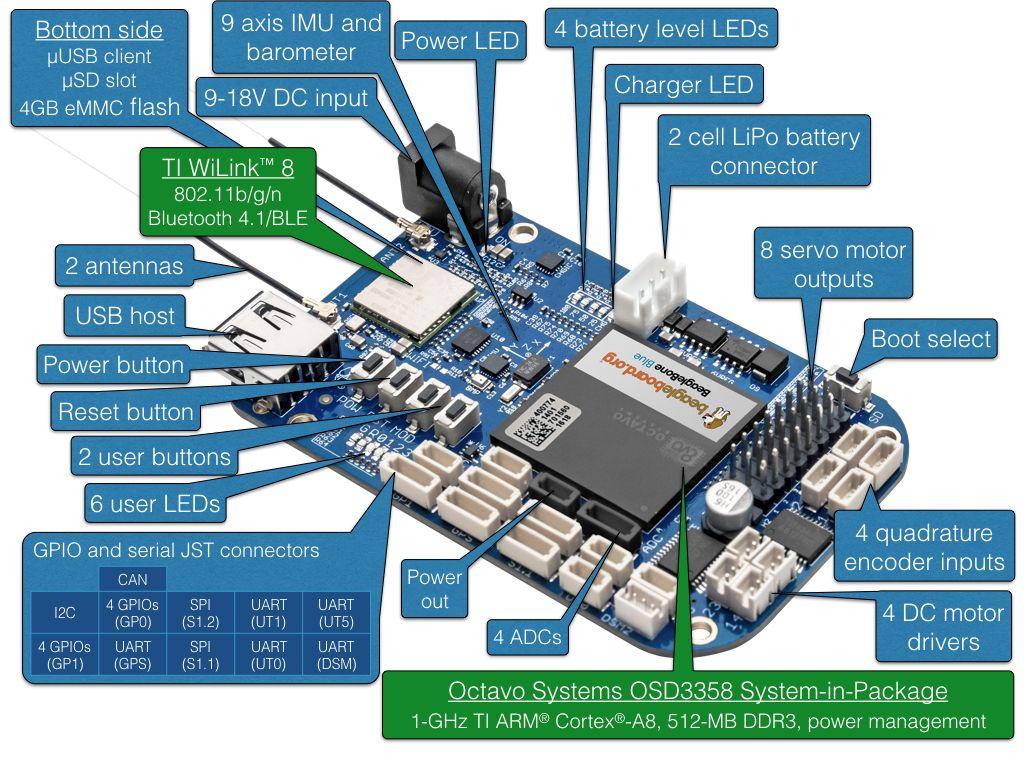
BeagleBone Blue is an all-in-one Linux-based computer. Хоча ця компактна і недорога плата оптимізована для робототехніки, вона має всі необхідні датчики і периферійні пристрої, необхідні для керування польотом. This topic shows how to set up the board to run PX4 with librobotcontrol robotics package.
OS Image
BeagleBone Blue images can be found here:
- Latest stable OS image.
- Test OS images (updated frequently).
Information about flashing OS images can be found on this page. Other useful information can be found in the FAQ.
TIP
Optionally you can update to a realtime kernel, and if you do, re-check if librobotcontrol works properly with the realtime kernel.
The latest OS images at time of updating this document is AM3358 Debian 10.3 2020-04-06 4GB SD IoT.
Збірка для крос-компіляторів (рекомендується)
The recommended way to build PX4 for BeagleBone Blue is to compile on a development computer and upload the PX4 executable binary directly to the BeagleBone Blue.
TIP
This approach is recommended over native build due to speed of deployment and ease of use.
INFO
The PX4 build requires librobotcontrol which is automatically included in the build (but it can be installed and tested independently if required).
Налаштування Beaglebone Blue WIFI
Для зручного доступу до плати ви можете підключити її до домашньої мережі через Wi-Fi.
Кроки наступні (виконайте на платі):
sudo su
connmanctl
connmanctl>scan wifi
connmanctl>services
#(at this point you should see your network SSID appear.)
connmanctl>agent on
connmanctl>connect <SSID>
Enter Passphrase
connmanctl>quitINFO
The format of the <SSID> above is normally the text 'wifi' followed by a string of other characters. Після введення команди вам буде запропоновано ввести пароль для wifi.
SSH root-логін на Beaglebone
Root-логін можна увімкнути на платі за допомогою:
sudo su
echo "PermitRootLogin yes" >> /etc/ssh/sshd_config && systemctl restart sshdНалаштування крос-компілятора
First set up rsync (this is used to transfer files from the development computer to the target board over a network - WiFi or Ethernet). For rsync over SSH with key authentication, follow the steps here (on the development machine):
Створіть ключ SSH, якщо ви раніше цього не робили:
shssh-keygen -t rsa- ENTER //no passphrase
- ENTER
- ENTER
Define the BeagleBone Blue board as
beaglebonein /etc/hosts and copy the public SSH key to the board for password-less SSH access:shssh-copy-id debian@beagleboneКрім того, ви можете використовувати IP-адресу beaglebone безпосередньо:
shssh-copy-id debian@<IP>На запитання, чи довіряєте ви: yes
Введіть root пароль
Налаштування крос-компіляції
- Завантаження інструментів
First install the toolchain into /opt/bbblue_toolchain/gcc-arm-linux-gnueabihf. Ось приклад використання софт-посилання для вибору версії набору інструментів, яку ви хочете використовувати:
shmkdir -p /opt/bbblue_toolchain/gcc-arm-linux-gnueabihf chmod -R 777 /opt/bbblue_toolchain cd /opt/bbblue_toolchain/gcc-arm-linux-gnueabihfThe ARM Cross Compiler for BeagleBone Blue can be found at Linaro Toolchain Binaries site.
TIP
GCC in the toolchain should be compatible with kernel in BeagleBone Blue. General rule of thumb is to choose a toolchain where version of GCC is not higher than version of GCC which comes with the OS image on BeagleBone Blue.
- Завантаження інструментів
:::
Download and unpack [gcc-linaro-13.0.0-2022.06-x86_64_arm-linux-gnueabihf.tar.xz](https://snapshots.linaro.org/gnu-toolchain/13.0-2022.06-1/arm-linux-gnueabihf/gcc-linaro-13.0.0-2022.06-x86_64_arm-linux-gnueabihf.tar.xz) to the bbblue_toolchain folder.
Different ARM Cross Compiler versions for _BeagleBone Blue_ can be found at [Linaro Toolchain Binaries site](https://www.linaro.org/downloads/).
```sh
wget https://snapshots.linaro.org/gnu-toolchain/13.0-2022.06-1/arm-linux-gnueabihf/gcc-linaro-13.0.0-2022.06-x86_64_arm-linux-gnueabihf.tar.xz
tar -xf gcc-linaro-13.0.0-2022.06-x86_64_arm-linux-gnueabihf.tar.xz
```
::: tip
The GCC version of the toolchain should be compatible with kernel in _BeagleBone Blue_.
:::
As a general rule of thumb is to choose a toolchain where the version of GCC is not higher than the version of GCC which comes with the OS image on _BeagleBone Blue_.
2. Додайте його до PATH в ~/.profile, як показано нижче
```sh
export PATH=$PATH:/opt/bbblue_toolchain/gcc-arm-linux-gnueabihf/gcc-linaro-13.0.0-2022.06-x86_64_arm-linux-gnueabihf/bin
```
::: info
Logout and Login to apply the change, or execute the same line on your current shell.
:::
3. Налаштуйте інші залежності, завантаживши вихідний код PX4, а потім виконайте сценарії налаштування:
````sh
git clone https://github.com/PX4/PX4-Autopilot.git --recursive
ols
```
You may have to edit the upload target to match with your setup:
```sh
nano PX4-Autopilot/boards/beaglebone/blue/cmake/upload.cmake
# in row 37 change debian@beaglebone.lan TO root@beaglebone (or root@<IP>)
````
See the [Development Environment Setup](../dev_setup/dev_env_linux_ubuntu.md) instructions for additional information.
Налаштування крос-компіляції та завантаження
Компіляція та завантаження
make beaglebone_blue_default uploadINFO
Without upload, files stored local in build folder.
To test the uploaded files, run the following commands on the BeagleBone Blue board:
cd /home/debian/px4
sudo ./bin/px4 -s px4.configINFO
Currently librobotcontrol requires root access.
Native Builds (optional)
Ви також можете нативно створювати збірки PX4 безпосередньо на BeagleBone Blue.
Після придбання готової бібліотеки,
- Select the librobotcontrol installation directory, and set it in the
LIBROBOTCONTROL_INSTALL_DIRenvironment variable so that other unwanted headers will not be included - Install robotcontrol.h and rc/* into
$LIBROBOTCONTROL_INSTALL_DIR/include - Install pre-built native (ARM) version of librobotcontrol.* into
$LIBROBOTCONTROL_INSTALL_DIR/lib
Виконайте наступні команди на BeagleBone Blue (тобто через SSH):
Встановіть залежності:
shsudo apt-get update sudo apt-get install cmake python3-empy=3.3.4-2Клонуйте програмне забезпечення PX4 безпосередньо на плату BeagleBone Blue.
Continue with the standard build system installation.
Зміни в конфігурації
All changes can be made in the px4.config file directly on beaglebone. Наприклад, ви можете змінити WIFI на wlan.
INFO
If you want to change permanently, you have to change PX4-Autopilot/posix-configs/bbblue/px4.config on the Build Machine before build.
Автозапуск під час завантаження
Ось приклад [/etc/rc.local]:
#!/bin/sh -e
#
# rc.local
#
# This script is executed at the end of each multiuser runlevel.
# Make sure that the script will "exit 0" on success or any other
# value on error.
#
# In order to enable or disable this script just change the execution
# bits.
#
# By default this script does nothing.
# wait for services to start up
/bin/sleep 25
cd /home/debian/px4
/home/debian/px4/bin/px4 -d -s /home/debian/px4/px4.config > /home/debian/px4/PX4.log &
exit 0Below is a systemd service example [/lib/systemd/system/px4-quad-copter.service]:
[Unit]
Description=PX4 Quadcopter Service
After=networking.service network-online.target
StartLimitIntervalSec=0
Conflicts=px4-fixed-wing.service
[Service]
WorkingDirectory=/home/debian/px4
User=root
ExecStart=/home/debian/px4/bin/px4 -d -s /home/debian/px4/px4.config
Restart=on-failure
RestartSec=1
[Install]
WantedBy=multi-user.targetІнше
Силова серворейка
Коли PX4 починає працювати, він автоматично подає живлення на сервоприводи.
Унікальні можливості
BeagleBone Blue має деякі унікальні функції, такі як кілька варіантів інтерфейсів WiFi та джерел живлення. Refer to comments in /home/debian/px4/px4.config for usage of these features.
Перетворювач сигналів SBUS
Сигнал SBUS від приймача (наприклад, FrSky X8R) є інвертованим сигналом. UARTs на BeagleBone Blue можуть працювати лише з неінвертованим сигналом рівня 3,3 В. This tutorial contains a SBUS signal inverter circuit.
Типові підключення
Для квадрокоптера з GPS і приймачем SBUS, ось типові схеми підключення:
- Підключіть ESC двигуна 1, 2, 3 та 4 до каналу 1, 2, 3 та 4 вихідних сигналів сервоприводів на BeagleBone Blue відповідно. Якщо ваш роз'єм ESC містить вихідний контакт живлення, вийміть його і не підключайте його до вихідного контакту живлення каналу сервоприводу на BeagleBone Blue.
- Connect the above mentioned converted SBUS signal to the dsm2 port if you have the matching connector for dsm2, otherwise connect it to any other available UART port and change the corresponding port in /home/debian/px4/px4.config accordingly.
- Підключіть сигнали модуля GPS до порту GPS на платі BeagleBone Blue. Зверніть увагу, що сигнальні контакти порту GPS на BeagleBone Blue підтримують лише 3,3 В, тому обирайте свій GPS-модуль відповідно.