TFSLOT датчик швидкості польоту ефекту Вентурі
TFSLOT is an open-source airspeed sensor based on the Venturi effect that also has an IMU.
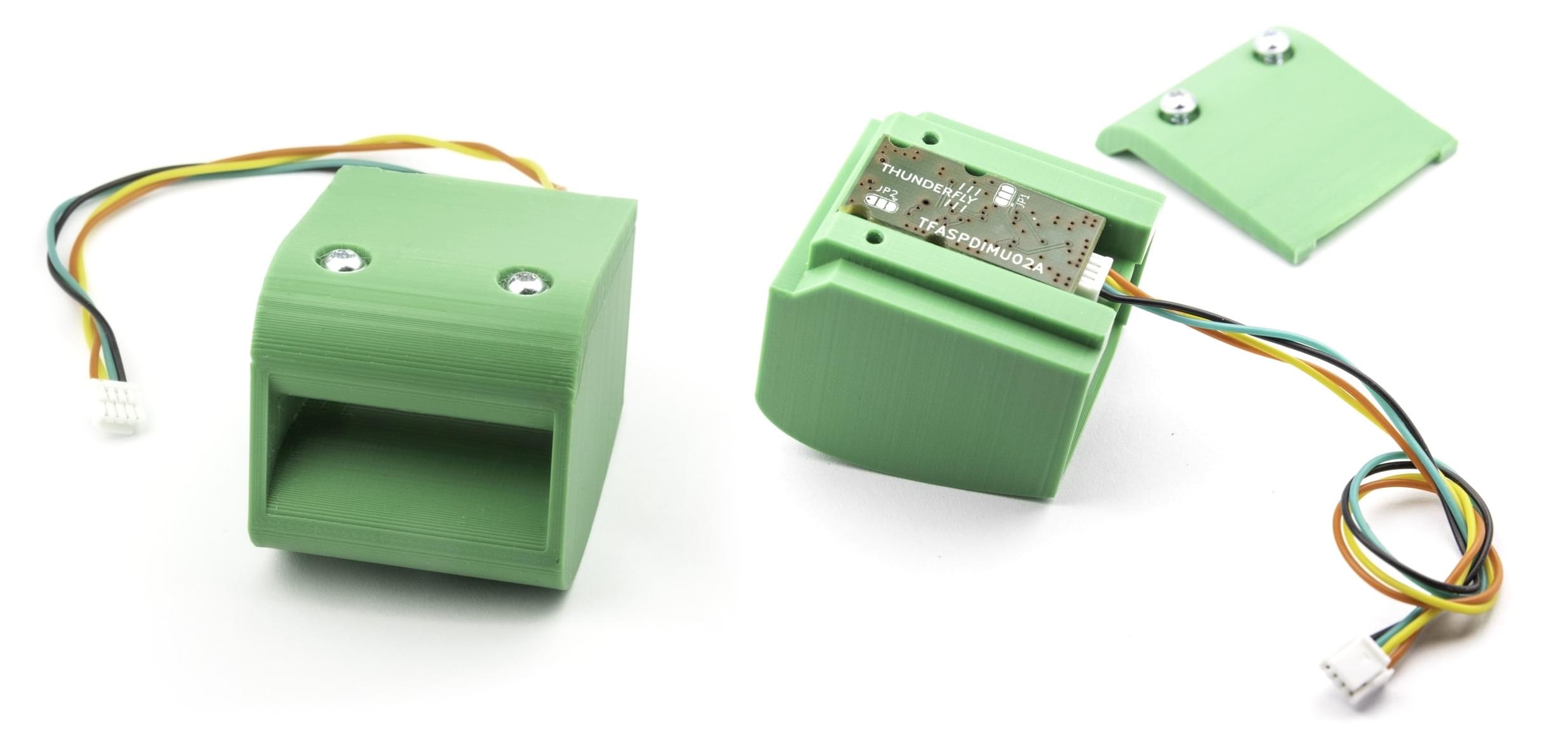
TFSLOT is an airspeed sensor based on venturi effects. In the basic configuration, the TFSLOT is equipped with the TFASPDIMU02 sensor board, which contains a differential pressure sensor (Sensirion SDP3x series) and a 9-axis motion tracking sensor (ICM-20948). Одиницю IMU можна використовувати як зовнішній компас.
- Цей дизайн має кілька переваг при використанні на невеликих і повільних безпілотних літальних апаратах.
- Краща роздільна здатність при низьких швидкостях повітря (нижче 10 м/с).
- Налаштована чутливість, яка надається зміною профілю.
- Менша схильність до засмічення (наприклад, глиною після посадки)
- Стійкий до погодних умов (дощ, сніг тощо)
- Пряме інтегрування датчика різниці тиску без будь-яких додаткових трубок. Менше шансів на відмову датчика.
- Можливість прямої інтеграції в конструкцію безпілотника. Дизайн є повністю відкритим джерелом.
- Інтегрований зовнішній блок ІНС.
Завдяки надрукованому трубці дуже легко змінити профіль вимірювання і таким чином змінити чутливість в певних діапазонах швидкості. У базовій формі воно оптимізовано так, що виміряний диференційний тиск відповідає тиску від труби Піто.
 First integration of TFSLOT into TF-G2 autogyro
First integration of TFSLOT into TF-G2 autogyro
INFO
Full documentation and source files can be found on GitHub.
Де купити
TFSLOT is possible to buy at Tindie store or by sending us an inquiry via email at info@thunderfly.cz
Підключення
TFASPDIMU02 is equipped with I2C JST-GH connector, which conforms to the pinout of the dronecode standard. Отже, датчик може бути підключений безпосередньо до порту I2C автопілота за допомогою кабелю I2C 4pin JST-GH.
Налаштування
Because there is an IMU IC connected in front of the sensor, the IMU IC needs to be set into a bridge mode. Після цього можна запустити драйвер датчика швидкості повітря. Це може бути зроблено за допомогою наступних послідовностей команд. Команди передбачають підключення до порту I2C2.
icm20948_i2c_passthrough start -X -b 2 -a 0x68
sdp3x_airspeed start -X -b 2This sequence can be stored on the SD card in the /etc/config.txt file. You can read more about the configuration on the SD card on a separate page.
Оскільки перетворення різниці тиску на швидкість повітря відрізняється від трубки Піто, цей профіль потребує змін. This is done by setting parameter CAL_AIR_CMODEL to 3 (Venturi effect based airspeed sensor)
Калібрування
Калібрування дещо складне через те, що поточна версія прошивки не підтримує калібрування з від'ємними значеннями. Оскільки використовуваний датчик вимірює обидва напрямки повітряного потоку симетрично і має нульове зміщення, немає потреби калібрувати його знову перед кожним зльотом. Але вам потрібно забезпечити, щоб під час калібрування не було потоку повітря.
Найлегший спосіб калібрування - взяти клейку стрічку і приклеїти її між тиском на входах до датчика. Потім розпочніть процес калібрування і дмухайте ззаду, коли буде вимога. Якщо буде створено тиск принаймні 50 Па, калібрування буде успішним.