Режим повернення (мультикоптер)
")
Режим польоту Return використовується для повернення транспортного засобу до безпеки по вільному шляху до безпечного пункту призначення, де він може приземлитися.
Multicopters use a home/rally point return type by default. In this return type vehicles ascend to a safe altitude above obstructions if needed, fly to the closest safe landing point (a rally point or the home position) via the shortest horizontal geofence-aware path, descend to the "descent altitude", wait briefly, and then land. Висота повернення, висота зниження та затримка при посадці зазвичай встановлені на консервативні "безпечні" значення, але їх можна змінити за потреби.
Multicopter supports the other PX4 return types, including mission landing, mission path and closest safe destination. За замовчуванням рекомендується використовувати цей тип.
INFO
- Режим автоматичний - для керування апаратом не потрібно втручання користувача.
- Режим вимагає глобальної оцінки 3D-позиції (з GPS або виведеної з локальної позиції).
- Літаючі транспортні засоби не можуть переключатися на цей режим без глобального положення.
- Літаючі транспортні засоби перейдуть в режим аварійної безпеки, якщо втратять оцінку положення.
- Режим вимагає встановленої домашньої позиції.
- Mode prevents arming (vehicle cannot be armed while this mode is selected).
- Перемикачі керування RC можуть використовуватися для зміни режимів польоту на будь-якому транспортному засобі.
- Stick movement will by default change the vehicle to Position mode unless prevented by the active failsafe state.
Технічний підсумок
Multicopters use the home/rally point return type by default. (RTL_TYPE=0). У цьому типі повернення вертольот:
- Піднімається на мінімальну висоту повернення (безпечно вище будь-яких очікуваних перешкод). Транспортний засіб підтримує свою початкову висоту, якщо вона вище, ніж мінімальна висота повернення.
- Flies via a constant-altitude path to the safe landing point, which will be the nearest of any rally points and the home position. The path is chosen to be the shortest horizontal geofence-aware path.
- Прибуваючи до пункту призначення, він швидко спускається на «висоту спуску» (RTL_DESCEND_ALT).
- Він чекає протягом налаштованого часу (RTL_LAND_DELAY), який може бути використаний для розгортання шасі посадки.
- Потім сідає на землю.
Мінімальна висота повернення
За замовчуванням мінімальна висота повернення встановлюється за допомогою RTL_RETURN_ALT, і транспортний засіб просто повернеться на вищу з висоти RTL_RETURN_ALT або початкової висоти транспортного засобу.
The minimum return altitude can be further configured using RTL_CONE_ANG and RTL_MIN_DIST, which together with RTL_RETURN_ALT define a half cone centered around the destination landing point. Within RTL_MIN_DIST of the destination, the return altitude is calculated from the cone geometry rather than set directly to RTL_RETURN_ALT, allowing a lower minimum return altitude when close to the destination. This is useful when there are few obstacles near the destination, as it may reduce the height the vehicle needs to ascend before landing, and hence power consumption and time to land.
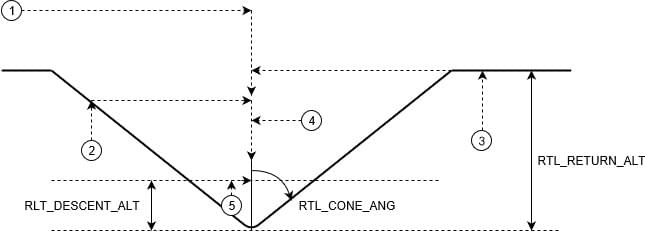
The cone affects the minimum return altitude if return mode is triggered within the cylinder defined by the maximum cone radius (RTL_MIN_DIST) and RTL_RETURN_ALT: outside this cylinder RTL_RETURN_ALT is used. Inside the cone, the vehicle returns at an altitude calculated from the cone geometry, up to RTL_RETURN_ALT. After reaching the destination, it descends to RTL_DESCEND_ALT (if above that altitude) before landing or loitering.
For more information on this return type see Home/Rally Point Return Type (RTL_TYPE=0)
Параметри
Параметри RTL перелічені в Референсі параметрів > Режим повернення.
Параметри, які є важливими для мультикоптерів (припускаючи, що RTL_TYPE встановлено на 0), перераховані нижче.
| Parameter | Опис |
|---|---|
| RTL_RETURN_ALT | Повернути висоту в метрах (за замовчуванням: 60м), коли RTL_CONE_ANG дорівнює 0. Якщо вже вище цієї величини, транспортний засіб повернеться на поточну висоту. |
| RTL_DESCEND_ALT | Altitude above the destination used for the final descent before landing or loitering (default: 30m). |
| RTL_LAND_DELAY | Time to hover at RTL_DESCEND_ALT before landing (default: 0.5s) - by default this period is short so that the vehicle will simply slow and then land immediately. Якщо встановлено значення -1, система буде кружляти на висоті RTL_DESCEND_ALT замість посадки. Затримка надається для того, щоб ви могли налаштувати час для розгортання шасі для посадки (автоматично спрацьовує). |
| RTL_MIN_DIST | Within this distance from the home position, the return altitude is calculated from the "cone" rather than directly from RTL_RETURN_ALT. |
| RTL_CONE_ANG | Половина кута конуса, який визначає висоту повернення транспортного засобу RTL. Values (in degrees): 0, 25, 45, 65, 80, 90. Note that 0 is "no cone" (always return at RTL_RETURN_ALT or higher), while 90 indicates an almost vertical cone, so the vehicle generally returns at its current altitude when close to the destination. The return altitude may still be constrained to avoid flying too low while approaching the destination. |
| MAN_OVERRIDE_SPD | Speed (normalized stick travel per second) above which moving the sticks controlling a multicopter (or VTOL in hover) gives control back to the pilot by switching to Position mode (or Altitude mode if position is unavailable). At the default value of 1 a half-stick movement in ~0.5 s triggers it; lower is more sensitive. A stick held statically has zero speed and will not trigger. Set to -1 to disable. PX4 v1.18 |