Використання Vision або Motion Capture систем для Position Estimation
Системи візуальної інерційної одометрії (VIO) та захоплення руху (MoCap) дозволяють транспортним засобам здійснювати навігацію, коли джерело глобального позиціонування недоступне або ненадійне (наприклад, в приміщенні або під час прольоту під мостом. тощо).
Both VIO and MoCap determine a vehicle's pose (position and attitude) from "visual" information. Основна відмінність між ними - перспектива кадру:
- VIO uses onboard sensors to get pose data from the vehicle's perspective (see egomotion).
- MoCap uses a system of off-board cameras to get vehicle pose data in a 3D space (i.e. it is an external system that tells the vehicle its pose).
Дані про положення, отримані від обох типів систем, можуть бути використані для оновлення оцінки локального положення автопілота на базі PX4 (відносно локальної точки відліку), а також, за бажанням, можуть бути інтегровані в оцінку положення транспортного засобу. Крім того, якщо зовнішня система позиціонування також забезпечує вимірювання лінійної швидкості, її можна використовувати для покращення оцінки стану (об'єднання вимірювань лінійної швидкості підтримується лише EKF2).
This topic explains how to configure a PX4-based system to get data from MoCap/VIO systems (either via ROS or some other MAVLink system) and more specifically how to set up MoCap systems like VICON and Optitrack, and vision-based estimation systems like ROVIO, SVO and PTAM).
INFO
The instructions differ depending on whether you are using the EKF2 or LPE estimator.
Інтеграція PX4 з MAVLink
PX4 uses the following MAVLink messages for getting external position information, and maps them to uORB topics:
| MAVLink | uORB |
|---|---|
| VISION_POSITION_ESTIMATE | vehicle_visual_odometry |
ODOMETRY (frame_id = MAV_FRAME_LOCAL_FRD) | vehicle_visual_odometry |
| ATT_POS_MOCAP | vehicle_mocap_odometry |
ODOMETRY (frame_id = MAV_FRAME_MOCAP_NED) | vehicle_mocap_odometry |
EKF2 only subscribes to vehicle_visual_odometry topics and can hence only process the first two messages (a MoCap system must generate these messages to work with EKF2). Повідомлення odometry є єдиним повідомленням, яке може також відправляти лінійні швидкості в PX4. Оцінювач LPE підписується на обидві теми, тому може обробляти всі вищезазначені повідомлення.
TIP
EKF2 is the default estimator used by PX4. Він краще протестований і підтримується, ніж LPE, і його слід використовувати за умовчанням.
Повідомлення повинні транслюватися з частотою між 30 Гц (якщо містять коваріанти) і 50 Гц. Якщо частота повідомлень занадто низька, EKF2 не буде обробляти повідомлення з зовнішнього візуального спостереження.
The following MAVLink "vision" messages are not currently supported by PX4: GLOBAL_VISION_POSITION_ESTIMATE, VISION_SPEED_ESTIMATE, VICON_POSITION_ESTIMATE
Основні відмінності
PX4 uses FRD (X Forward, Y Right and Z Down) for the local body frame as well for the reference frame. When using the heading of the magnetometer, the PX4 reference frame x axis will be aligned with north, so therefore it is called NED (X North, Y East, Z Down). Напрямок опорного каркасу оцінювача PX4 та напрямок зовнішньої оцінки положення в більшості випадків не збігаються. Therefore the reference frame of the external pose estimate is named differently, it is called MAV_FRAME_LOCAL_FRD.
Залежно від джерела вашого опорного каркасу, вам потрібно буде застосувати власне перетворення до оцінки положення перед надсиланням повідомлення MAVLink Vision/MoCap. Це необхідно для зміни орієнтації батьківського та дочірнього каркасу оцінки положення так, щоб вона відповідала конвенції PX4. Have a look at the MAVROS odom plugin for the necessary transformations.
TIP
ROS users can find more detailed instructions below in Reference Frames and ROS.
For example, if using the Optitrack framework the local frame has
If x_{mav}, y_{mav} and z_{mav} are the coordinates that are sent through MAVLink as position feedback, then we obtain:
x_{mav} = x_{mocap}
y_{mav} = z_{mocap}
z_{mav} = - y_{mocap}Regarding the orientation, keep the scalar part w of the quaternion the same and swap the vector part x, y and z in the same way. Ви можете застосувати цей трюк у будь-якій системі - якщо вам потрібно отримати рамку NED, подивіться на вивід вашого MoCap та обміняйте вісі відповідно.
Конфігурація та налаштування EKF2
Примітка: це короткий огляд. For more detailed information, check the Using PX4's Navigation Filter (EKF2)
The following parameters must be set to use external position information with EKF2 (these can be set in QGroundControl > Vehicle Setup > Parameters > EKF2).
| Parameter | Налаштування для Зовнішньої Оцінки Положення |
|---|---|
| EKF2_EV_CTRL | Set horizontal position fusion, vertical vision fusion, velocity fusion, and yaw fusion, according to your desired fusion model. |
| EKF2_HGT_REF | Set to Vision to use the vision as the reference source for altitude estimation. |
| EKF2_EV_DELAY | Встановіть різницю між міткою часу вимірювання та "фактичним" часом захоплення. For more information see below. |
| EKF2_EV_POS_X, EKF2_EV_POS_Y, EKF2_EV_POS_Z | Встановіть положення візійного датчика (або маркерів MoCap) відносно тіла робота. |
You can also disable GNSS, baro and range finder fusion using EKF2_GPS_CTRL, EKF2_BARO_CTRL and EKF2_RNG_CTRL, respectively.
TIP
Reboot the flight controller in order for parameter changes to take effect.
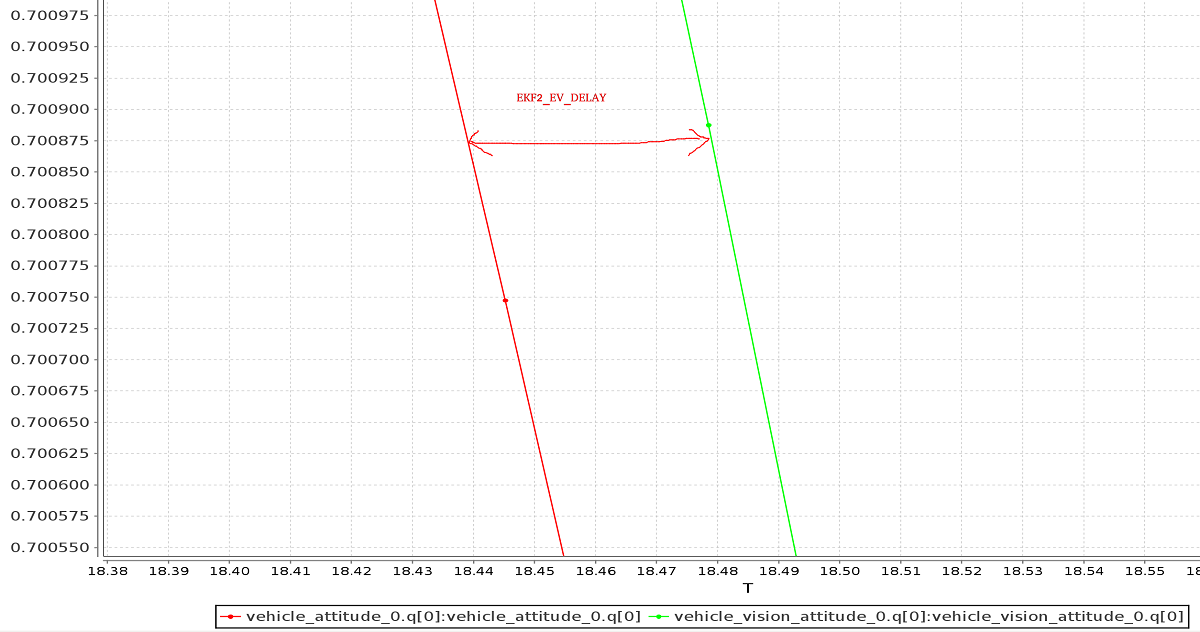
Tuning EKF2_EV_DELAY
EKF2_EV_DELAY - це затримка оцінювача позиції за допомогою візійної системи відносно вимірювань.
Іншими словами, це різниця між міткою часу системи комп'ютерного зору та "фактичним" часом захоплення, який був би зафіксований годинником IMU ("базовим годинником" для EKF2).
Технічно цей параметр можна встановити на 0, якщо між комп'ютерами MoCap і (наприклад) ROS є правильне маркування часу (не тільки час прибуття) і синхронізація часу (наприклад, NTP). In reality, this needs some empirical tuning since delays in the entire MoCap->PX4 chain are very setup-specific. Рідко коли система налаштована з повністю синхронізованим ланцюжком!
Приблизну оцінку затримки можна отримати з логів, перевіривши зсув між частотами IMU та EV. To enable logging of EV rates set bit 7 (Computer Vision and Avoidance) of SDLOG_PROFILE.
INFO
A plot of external data vs. onboard estimate (as above) can be generated using FlightPlot or similar flight analysis tools. At time of writing (July 2021) neither Flight Review nor MAVGCL support this functionality.
Значення можна додатково налаштувати, змінюючи параметр, щоб знайти значення, яке дає найнижчі інновації EKF під час динамічних маневрів.
LPE Конфігурація/Налаштування
You will first need to switch to the LPE estimator by setting the following parameters: LPE_EN (1), EKF2_EN (0), ATT_EN (0).
INFO
If targeting px4_fmu-v2 hardware you will also need to use a firmware version that includes the LPE module (firmware for other FMU-series hardware includes both LPE and EKF). The LPE version can be found in the zip file for each PX4 release or it can be built from source using the build command make px4_fmu-v2_lpe. See Building the Code for more details.
Увімкнення зовнішнього введення позиції
The following parameters must be set to use external position information with LPE (these can be set in QGroundControl > Vehicle Setup > Parameters > Local Position Estimator).
| Parameter | Налаштування для Зовнішньої Оцінки Положення |
|---|---|
| LPE_FUSION | Vision integration is enabled if fuse vision position is checked (it is enabled by default). |
| ATT_EXT_HDG_M | Встановіть значення 1 або 2, щоб увімкнути інтеграцію зовнішніх заголовків. Встановлення значення 1 призведе до використання зору, тоді як 2 увімкне використання заголовків MoCap. |
Вимкнення Barometer Fusion
Якщо високоточна висота вже доступна з інформації VIO або MoCap, може бути корисно вимкнути корекцію баро в LPE, щоб зменшити дрейф по осі Z.
This can be done by in QGroundControl by unchecking the fuse baro option in the LPE_FUSION parameter.
Параметри налаштування шуму
If your vision or MoCap data is highly accurate, and you just want the estimator to track it tightly, you should reduce the standard deviation parameters: LPE_VIS_XY and LPE_VIS_Z (for VIO) or LPE_VIC_P (for MoCap). Зменшення їх призведе до того, що оцінювач буде більше довіряти вхідній оцінці положення. Можливо, вам доведеться встановити їх нижче допустимого мінімуму та ввімкнути примусове збереження.
TIP
If performance is still poor, try increasing the LPE_PN_V parameter. Це змусить оцінювача більше довіряти вимірюванням під час оцінювання швидкості.
Увімкнення автоматичних режимів з локальним розташуванням
All PX4 automatic flight modes (such as Mission, Return, Land, Hold, Orbit)) require a global position estimate, which would normally come from a GPS/GNSS system.
Systems that only have a local position estimate (from MOCAP, VIO, or similar) can use the SET_GPS_GLOBAL_ORIGIN MAVLink message to set the origin of the EKF to a particular global location. Після цього EKF надасть оцінку глобального положення на основі походження та локального положення у просторі.
Це може бути використано при плануванні та виконанні місій у приміщенні, для встановлення місцевої точки повернення тощо.
Робота з ROS
ROS is not required for supplying external pose information, but is highly recommended as it already comes with good integrations with VIO and MoCap systems. PX4 вже мають бути налаштовані як вище.
Отримання даних про позицію в ROS
Системи VIO та MoCap мають різні способи отримання даних про положення, а також власні налаштування та теми.
The setup for specific systems is covered below. Для інших систем зверніться до документації з налаштування виробника.
Relaying Pose Data to PX4
MAVROS має плагіни для передачі візуальної оцінки з системи VIO або MoCap за допомогою наступних пайплайнів:
| ROS | MAVLink | uORB |
|---|---|---|
| /mavros/vision_pose/pose | VISION_POSITION_ESTIMATE | vehicle_visual_odometry |
/mavros/odometry/out (frame_id = odom, child_frame_id = base_link) | ODOMETRY (frame_id = MAV_FRAME_LOCAL_FRD) | vehicle_visual_odometry |
| /mavros/mocap/pose | ATT_POS_MOCAP | vehicle_mocap_odometry |
/mavros/odometry/out (frame_id = odom, child_frame_id = base_link) | ODOMETRY (frame_id = MAV_FRAME_LOCAL_FRD) | vehicle_mocap_odometry |
Ви можете використовувати будь-який з наведених вище пайплайнів за допомогою LPE.
Якщо ви працюєте з EKF2, підтримуються лише "vision" пайплайни. To use MoCap data with EKF2 you will have to remap the pose topic that you get from MoCap:
- MoCap ROS topics of type
geometry_msgs/PoseStampedorgeometry_msgs/PoseWithCovarianceStampedmust be remapped to/mavros/vision_pose/pose. Thegeometry_msgs/PoseStampedtopic is most common as MoCap doesn't usually have associated covariances to the data. - If you get data through a
nav_msgs/OdometryROS message then you will need to remap it to/mavros/odometry/out, making sure to update theframe_idandchild_frame_idaccordingly. - The odometry frames
frame_id = odom,child_frame_id = base_linkcan be changed by updating the file inmavros/launch/px4_config.yaml. However, the current version of mavros (1.3.0) needs to be able to use the tf tree to find a transform fromframe_idto the hardcoded frameodom_ned. The same applies to thechild_frame_id, which needs to be connected in the tf tree to the hardcoded framebase_link_frd. If you are using mavros1.2.0and you didn't update the filemavros/launch/px4_config.yaml, then you can safely use the odometry framesframe_id = odom,child_frame_id = base_linkwithout much worry. - Note that if you are sending odometry data to PX4 using
child_frame_id = base_link, then you need to make sure that thetwistportion of thenav_msgs/Odometrymessage is expressed in body frame, not in inertial frame!!!!!.
Референсні системи координат та ROS
Локальна/світова та світова системи координат, що використовуються в ROS та PX4, відрізняються.
| Frame | PX4 | ROS |
|---|---|---|
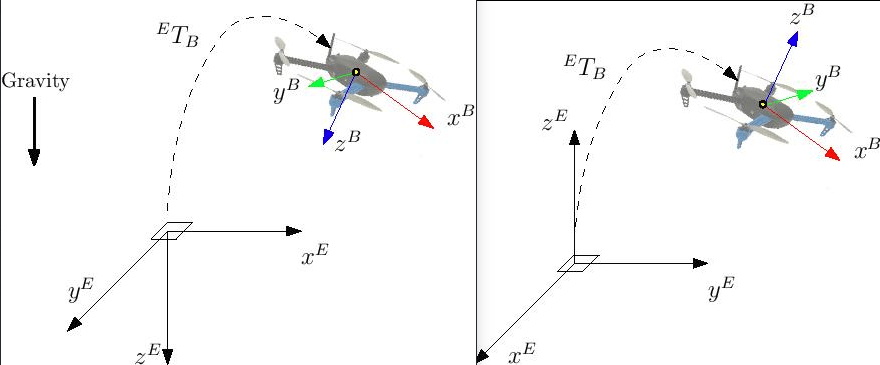
| Body | FRD (X Forward, Y Right, Z Down) | FLU (X Forward, Y Left, Z Up), usually named base_link |
| World | FRD or NED (X North, Y East, Z Down) | FLU or ENU (X East, Y North, Z Up), with the naming being odom or map |
TIP
See REP105: Coordinate Frames for Mobile Platforms for more information about ROS frames.
Обидві системи координат показані на зображенні нижче (FRD зліва / FLU справа).
З EKF2 при використанні зовнішньої оцінки напрямку магнітного північ може бути або ігноруватися, або зміщення напрямку до магнітного північного може бути розраховано та скомпенсовано. Depending on your choice the yaw angle is given with respect to either magnetic north or local x.
INFO
When creating the rigid body in the MoCap software, remember to first align the robot's local x axis with the world x axis otherwise the yaw estimate will have an offset. Це може призупинити правильну роботу злиття зовнішньої оцінки позиції. Кут крену повинен дорівнювати нулю, коли тіло та опорна система вирівнюються.
Використовуючи MAVROS, ця операція є простою. ROS використовує фрейми ENU як конвенцію, тому зворотний зв'язок щодо позиції повинен бути наданий в ENU. If you have an Optitrack system you can use mocap_optitrack node which streams the object pose on a ROS topic already in ENU. With a remapping you can directly publish it on mocap_pose_estimate as it is without any transformation and MAVROS will take care of NED conversions.
Плагін MAVROS відомий тим, що спрощує роботу з координатними рамками. Він використовує пакет tf ROS. Ваш зовнішній система позиціонування може мати зовсім іншу конвенцію рамки, яка не відповідає конвенції PX4. Корпусна рама зовнішньої оцінки позиції може залежати від того, як ви встановите корпусну раму в програмному забезпеченні MOCAP або від того, як ви встановите сенсор VIO на дрона. Плагін відомостей MAVROS потребує знання, як дитяча рамка зовнішньої позиції орієнтована відносно рамки тіла FRD або FLU повітряного судна, відомої за допомогою MAVROS. Отже, вам потрібно додати зовнішню позу тіла до дерева tf. Це можна зробити, включивши адаптовану версію наступного рядка до вашого ROS-файлу запуску.
<node pkg="tf" type="static_transform_publisher" name="tf_baseLink_externalPoseChildFrame"
args="0 0 0 <yaw> <pitch> <roll> base_link <external_pose_child_frame> 1000"/>Make sure that you change the values of yaw, pitch and roll such that it properly attaches the external pose's body frame to the base_link or base_link_frd. Have a look at the tf package for further help on how to specify the transformation between the frames. Ви можете використовувати rviz, щоб перевірити, чи ви правильно прикріпили рамку. The name of the external_pose_child_frame has to match the child_frame_id of your nav_msgs/Odometry message. Те ж саме стосується і для опорної рамки зовнішньої позиції. You have to attach the reference frame of the external pose as child to either the odom or odom_frd frame. Адаптуйте тому відповідно кодовий рядок.
<node pkg="tf" type="static_transform_publisher" name="tf_odom_externalPoseParentFrame"
args="0 0 0 <yaw> <pitch> <roll> odom <external_pose_parent_frame> 1000"/>If the reference frame has the z axis pointing upwards you can attached it without any rotation (yaw=0, pitch=0, roll=0) to the odom frame. The name of external_pose_parent_frame has to match the frame_id of the odometry message.
INFO
When using the MAVROS odom plugin, it is important that no other node is publishing a transform between the external pose's reference and child frame. This might break the tf tree.
Specific System Setups
OptiTrack MoCap
The following steps explain how to feed position estimates from an OptiTrack system to PX4. Припускається, що система MoCap налаштована. See this video for a tutorial on the calibration process.
Steps on the Motive MoCap software
- Align your robot's forward direction with the system +x-axis
- Define a rigid body in the Motive software. Give the robot a name that does not contain spaces, e.g.
robot1instead ofRigidbody 1 - Enable Frame Broadacst and VRPN streaming
- Встановіть вісь Up на ось Z (за замовчуванням - Y)
Отримання даних про позицію в ROS
- Install the
vrpn_client_rospackage - Ви можете отримати позу кожного жорсткого тіла на окрему тему, запустившиsh
roslaunch vrpn_client_ros sample.launch server:=<mocap machine ip>
If you named the rigidbody as robot1, you will get a topic like /vrpn_client_node/robot1/pose
Передача / перенаправлення даних про позу
MAVROS provides a plugin to relay pose data published on /mavros/vision_pose/pose to PX4. Assuming that MAVROS is running, you just need to remap the pose topic that you get from MoCap /vrpn_client_node/<rigid_body_name>/pose directly to /mavros/vision_pose/pose. Note that there is also a mocap topic that MAVROS provides to feed ATT_POS_MOCAP to PX4, but it is not applicable for EKF2. Однак, це застосовується з LPE.
INFO
Remapping pose topics is covered above Relaying pose data to PX4 (/vrpn_client_node/<rigid_body_name>/pose is of type geometry_msgs/PoseStamped).
Припускаючи, що ви налаштували параметри EKF2, як описано вище, PX4 тепер встановлений і об'єднує дані MoCap.
Ви тепер готові перейти до першого політ.
Перший політ
Після налаштування однієї з (специфічних) систем, описаних вище, ви повинні бути готові до тесту. Інструкції нижче показують, як це зробити для систем MoCap та VIO
Перевірте зовнішню оцінку
Перед першим польотом обов'язково виконайте наступні перевірки:
- Set the PX4 parameter
MAV_ODOM_LPto 1. PX4 will then stream back the received external pose as MAVLink ODOMETRY messages. - You can check these MAVLink messages with the QGroundControl MAVLink Inspector In order to do this, yaw the vehicle until the quaternion of the
ODOMETRYmessage is very close to a unit quaternion. (w=1, x=y=z=0) - На цьому етапі корпус виробу зорієнтований у відповідності з ориєнтацією відносно зовнішньої системи координат. Якщо вам не вдається отримати кватерніон, близький до одиничного, без обертання або нахилу вашого літака, це, ймовірно, означає, що ваша рама все ще має зміщення нахилу або кочування. У цьому випадку не продовжуйте і перевірте знову свої координатні рамки.
- Після зорієнтування ви можете підняти літак з землі, і ви маєте бачити, як координата z позиції зменшується. Переміщення засобу в напрямку вперед повинно збільшити координату X. Під час руху транспортного засобу вправо слід збільшувати координату y. У разі, якщо ви також надсилаєте лінійні швидкості зовнішньої системи позиціонування, вам також слід перевірити лінійні швидкості. Check that the linear velocities are in expressed in the FRD body frame reference frame.
- Set the PX4 parameter
MAV_ODOM_LPback to 0. PX4 припинить передавати це повідомлення назад.
Якщо ці кроки є послідовними, ви можете спробувати свій перший польот.
Покладіть робота на землю і почніть передавати зворотний зв'язок MoCap. Потягніть палицю газу вниз і зберметизуйте двигуни.
На цьому етапі, зліва палиця на найнижчому положенні, перейдіть у режим позиціонного контролю. Ви повинні побачити зелену лампочку. Зелена лампочка свідчить про те, що доступний зворотний зв'язок позиції, і позиційний контроль активований.
Помістіть лівий джойстик в середину, це зона мертвої зони. З цим значенням палиці робот підтримує свою висоту; підняття палиці збільшить висоту посилки, тоді як зниження значення зменшить її. Те ж саме для правої палиці по x та y.
Збільште значення лівої палиці, і робот злетить, поверніть його назад у середину праворуч після цього. Перевірте, чи він може утримати своє положення.
If it works, you may want to set up an offboard experiment by sending position-setpoint from a remote ground station.