Holybro X500 V2 + Pixhawk 6C (PX4 Dev Kit)
This topic provides full instructions for building the Holybro X500 V2 ARF Kit, also known as the Holybro PX4 Dev Kit.

Збірка
INFO
- Зображення в цьому документі можна вибрати, щоб переглянути відео на youtube крок за кроком.
- Кожний розділ перелічує всі необхідні гвинти у верхній частині.
Навантаження та тримач батареї
Screw- Sunk Screw M2.5*6 12pcs
Вставте резинове кільце підвіски-висувки в кожну з їхніх відповідних підвісок. Не використовуйте гострi предмети для натискання резинок всередині.

Take the battery mounting board and screw it with the slide bar clip using the Sunk Screw M2.5*6.

Screw 4 hangers to the Platform Board using Sunk Screw M2.5*6.
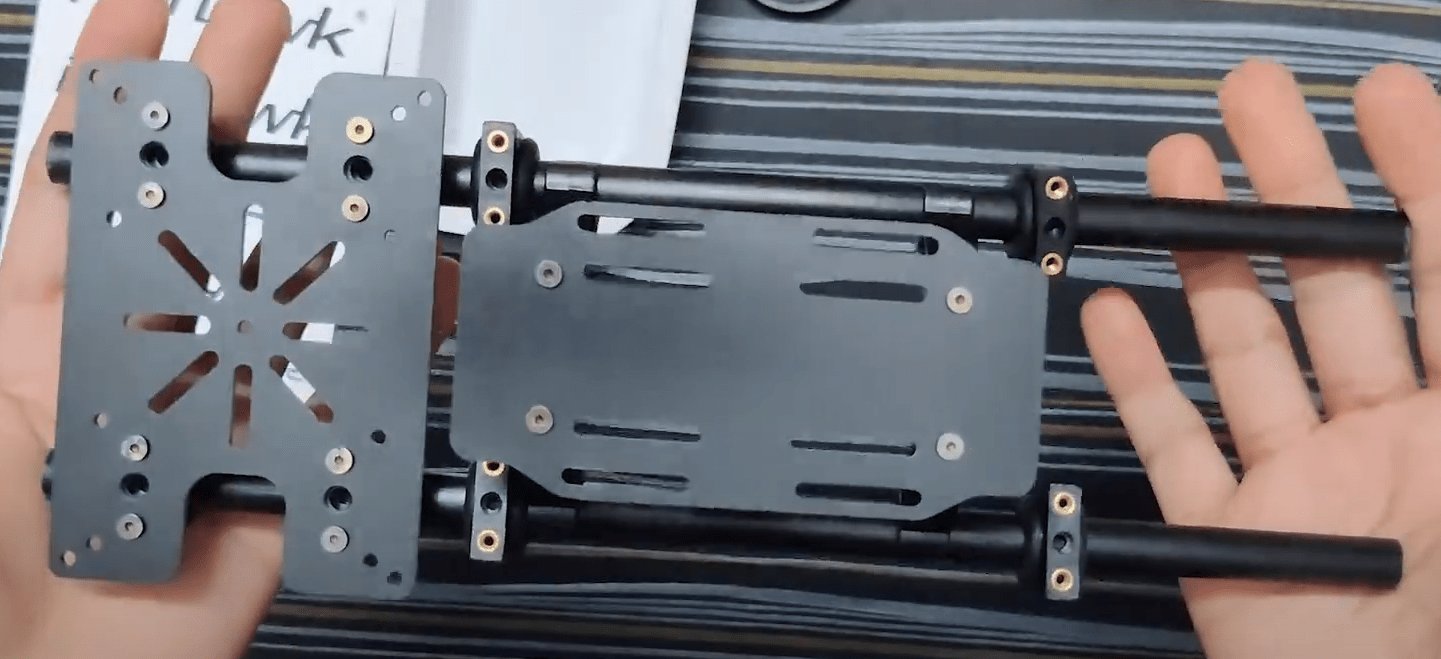 )
)Візьміть зациклювальну планку та вставте 4 вісця, щоб прикрутити до нижньої плати пізніше.
 )
)Now insert the battery holder and payload holders assembled in step 2 & 3
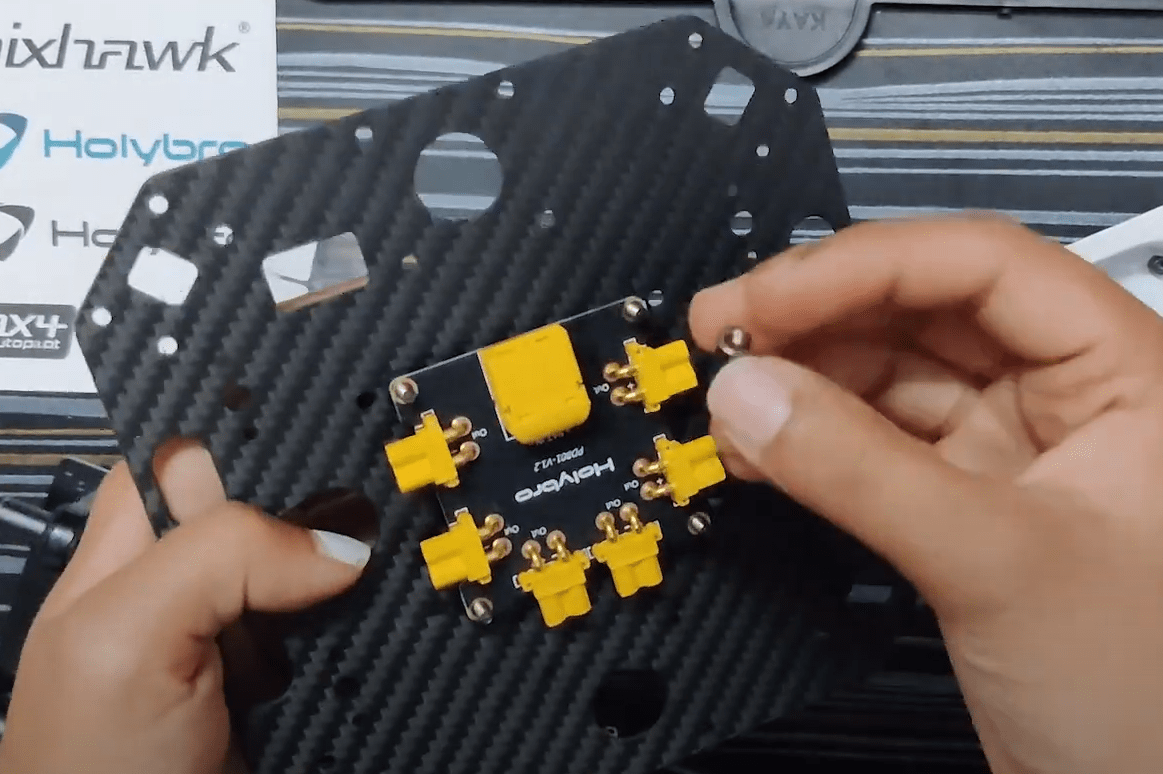
Модуль живлення
Screw- Socket Cap Screw M2.56 8pcs | Locknut M3 4pcs |Nylon Standoff M35 4pcs | Screw M3*14 4pcs
 )
)
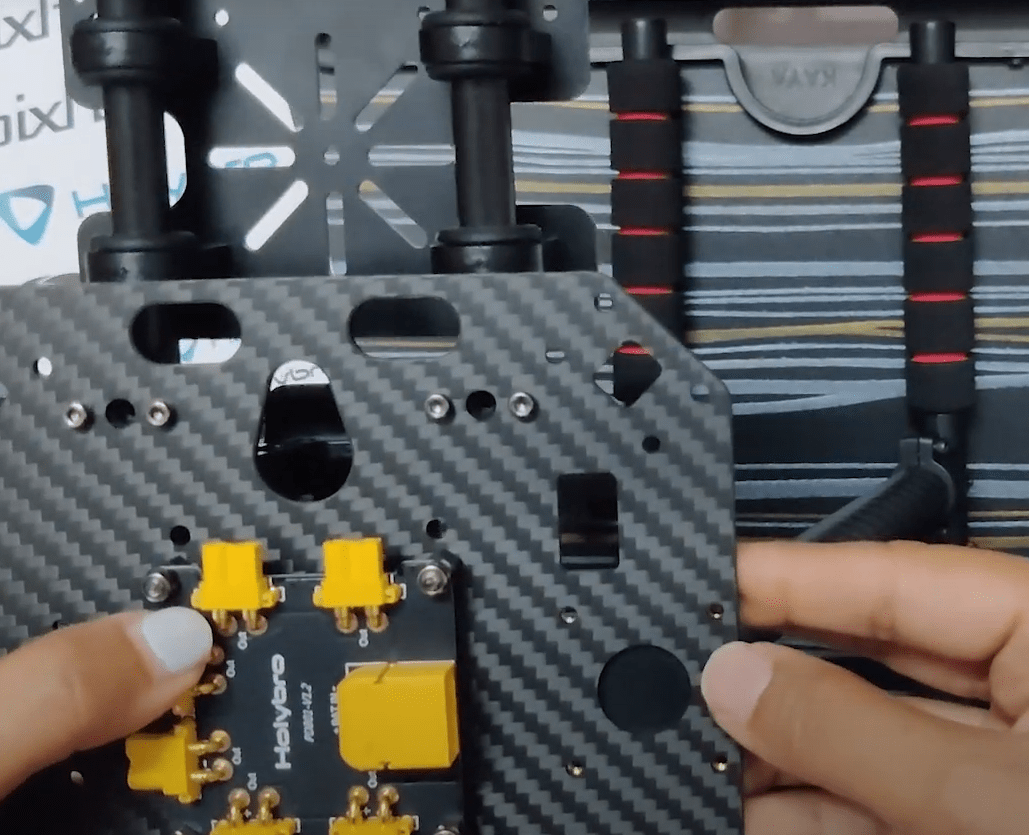
Take the bottom plate and insert 4 M3*14 screws and fasten the nylon standoffs on the same.
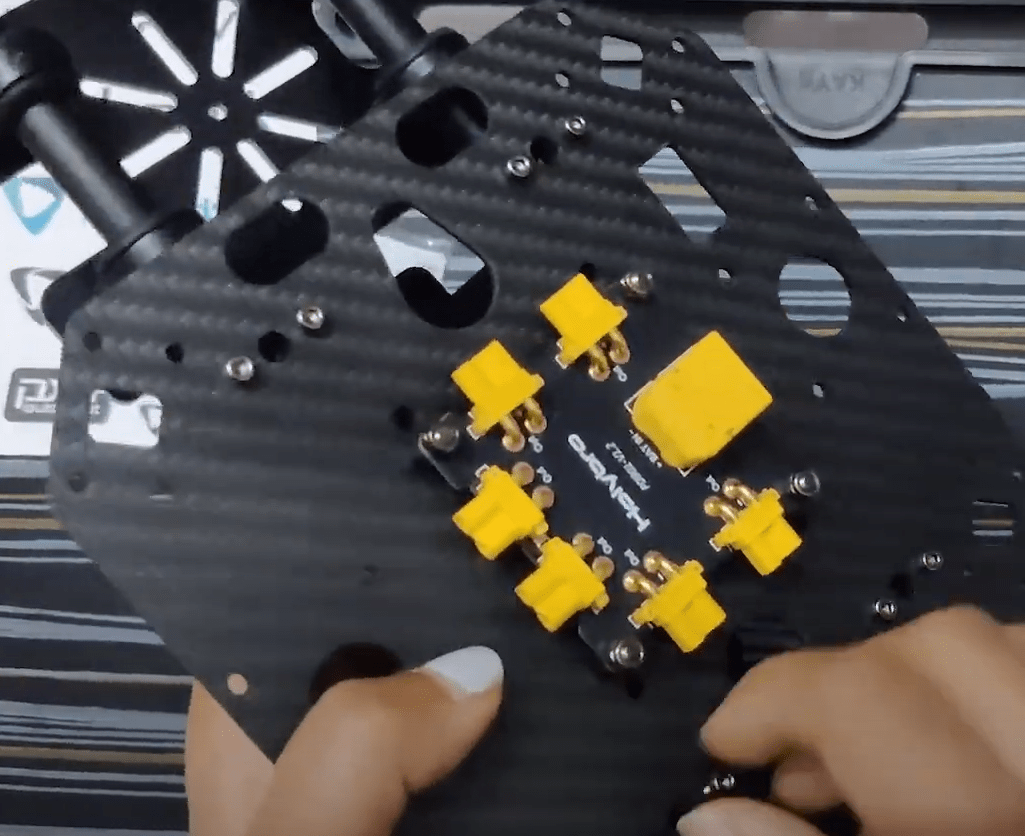
Розмістіть Планку розподілу живлення та використовуйте гайки-самостопорювачі для їх збирання. Модуль живлення PM02 (для Pixhawk 6C) буде живити цю плату
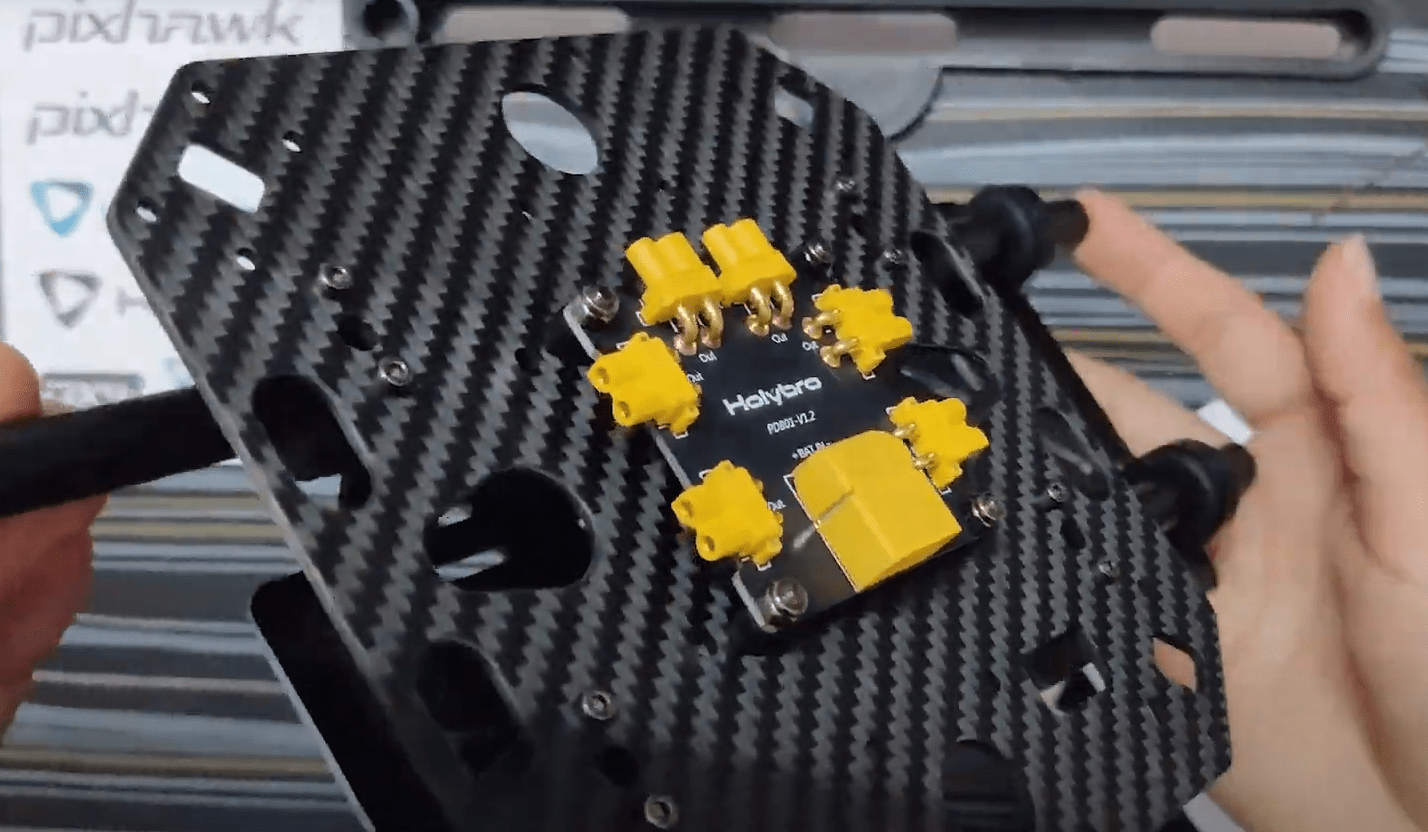
Use Socket Cap Screws M2.5*6 and screw the bottom plate on the 4 hangers (that we inserted in the 2 bars on the 3rd step of the payload holder assembly)
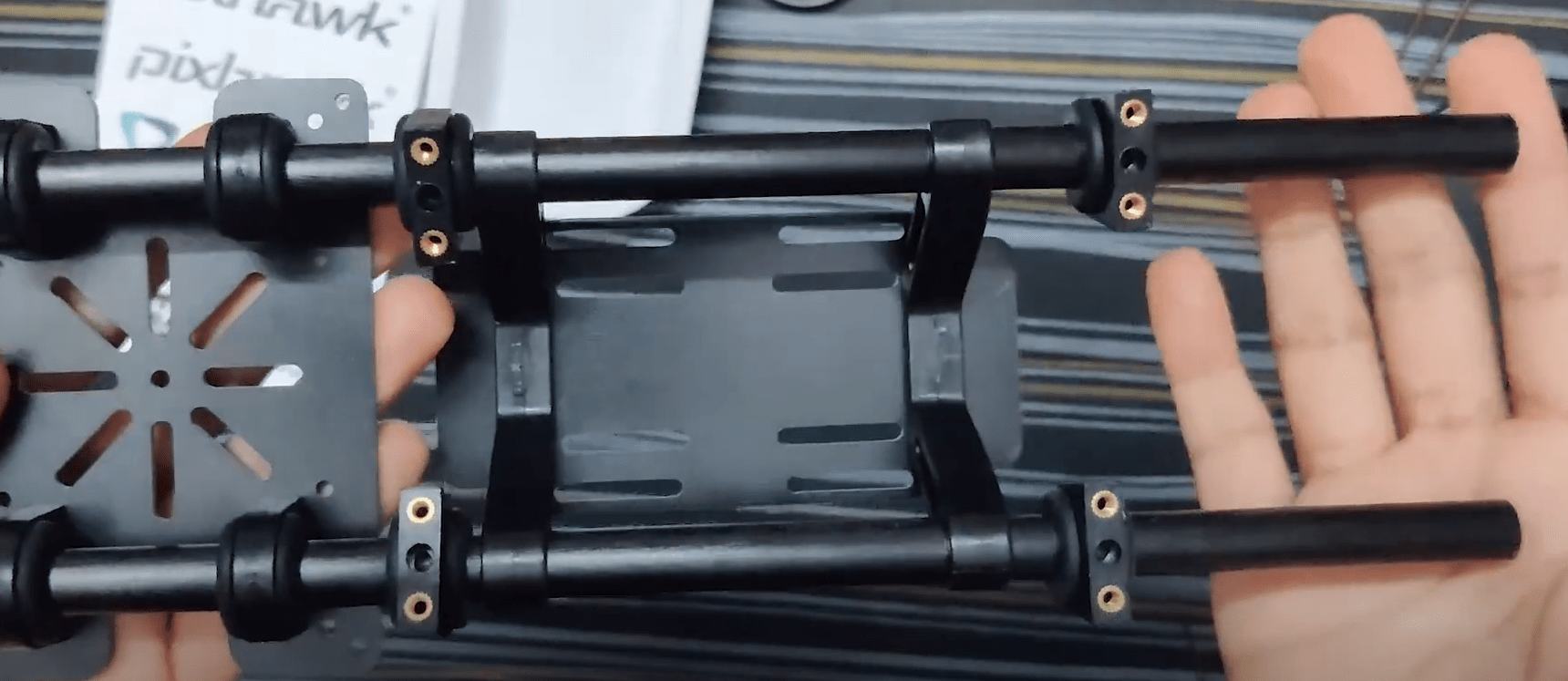
Landing Gear
Для збирання станції шасі відкрутіть заздалегідь складені винти шасі - перекрестна стрічка та вставте шасі - вертикальний стовп і затягніть той же.
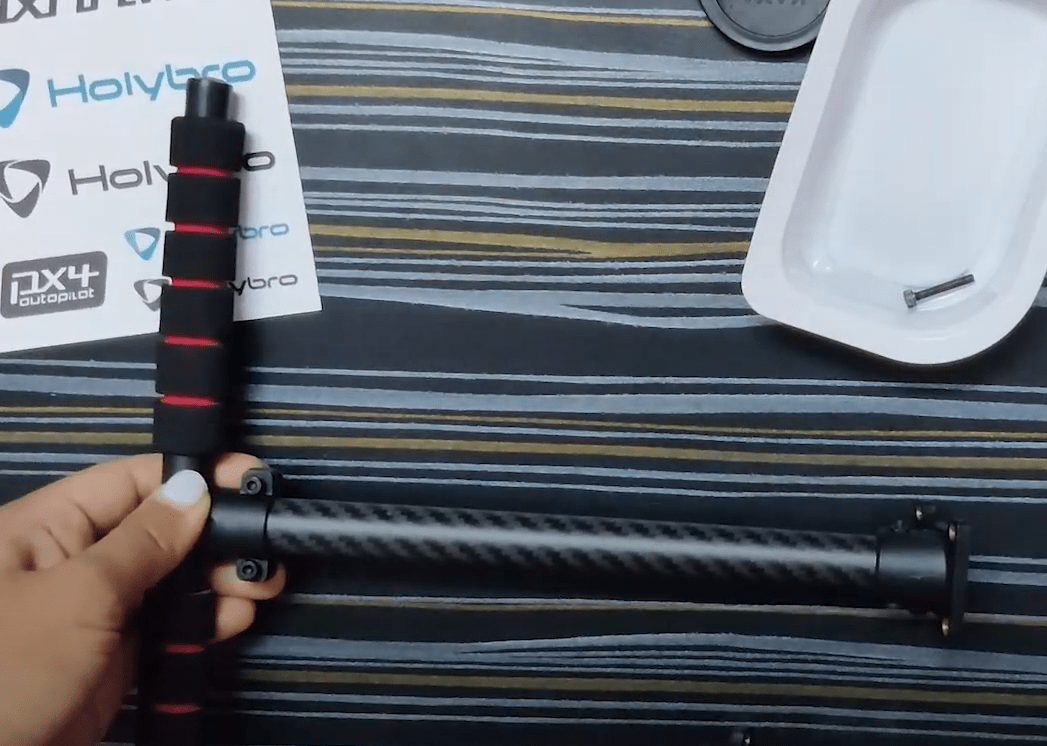

Use the Socket Cap Screw M3*8 to screw the landing gears to the bottom plate
Оскільки важко вставити проводи після того, як верхня плита складена, зробіть проводку заздалегідь. Хоча дизайн добре спроектований таким чином, що ви зможете зробити це пізніше також.
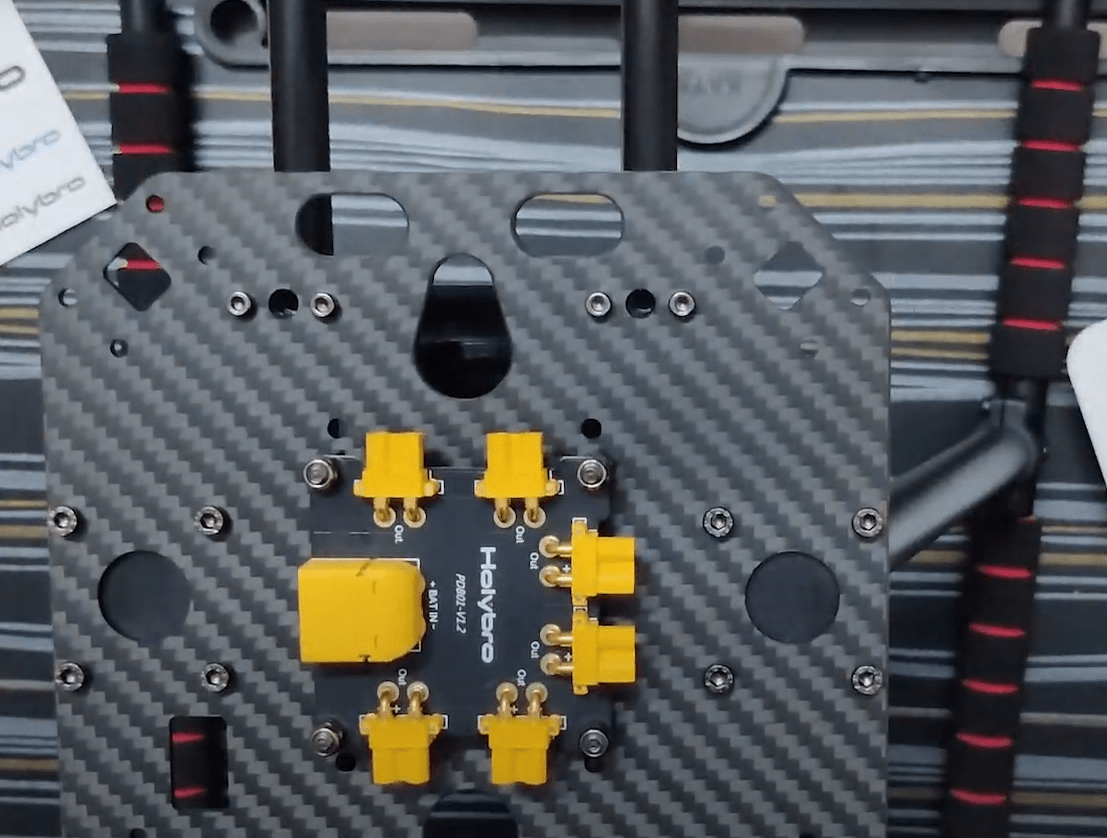
Power
Pixhawk 6C запитується за допомогою плати живлення PM02 (у цьому випадку). Цей модуль живлення постачається від батареї (4S 16.8V 5200 мАг)
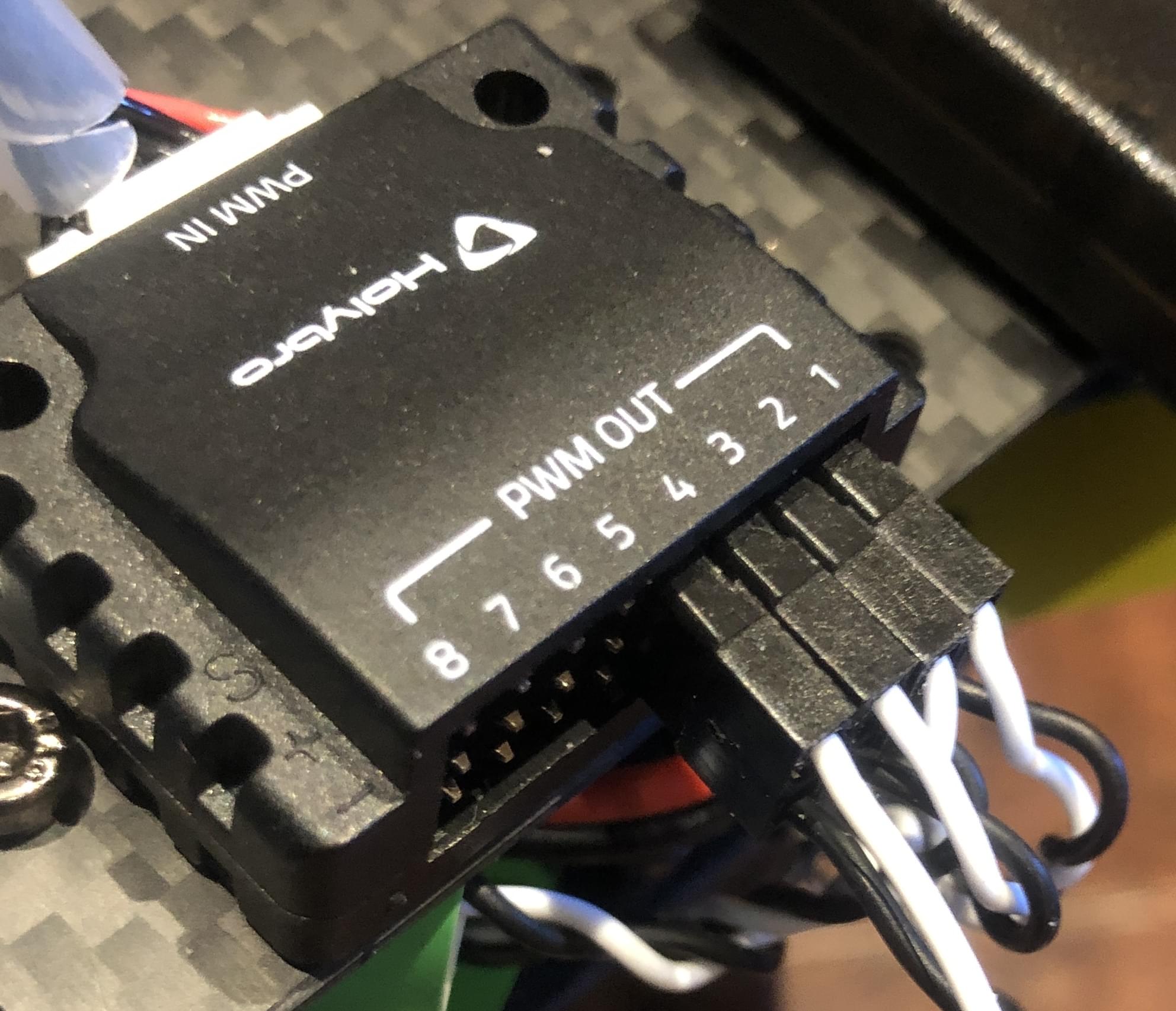
Двигуни живляться через розподільчу дошку живлення, як показано на наведеній нижче схемі.
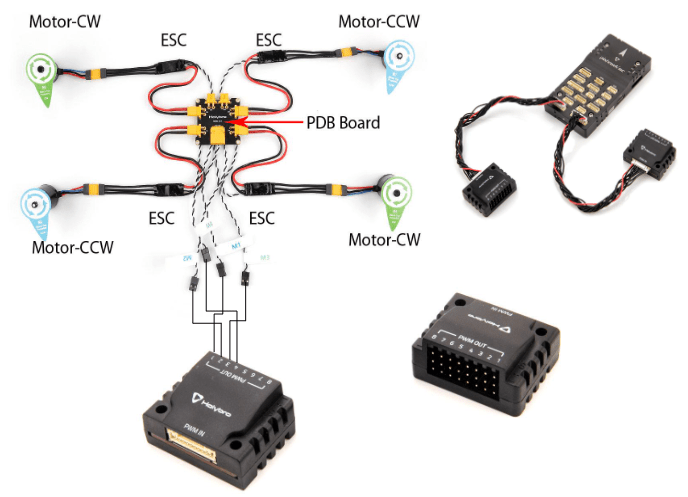
Зверніть увагу, що роз'єми ESC мають кольорову кодировку і повинні бути вставлені в PWM out так, що білий кабель зверху.
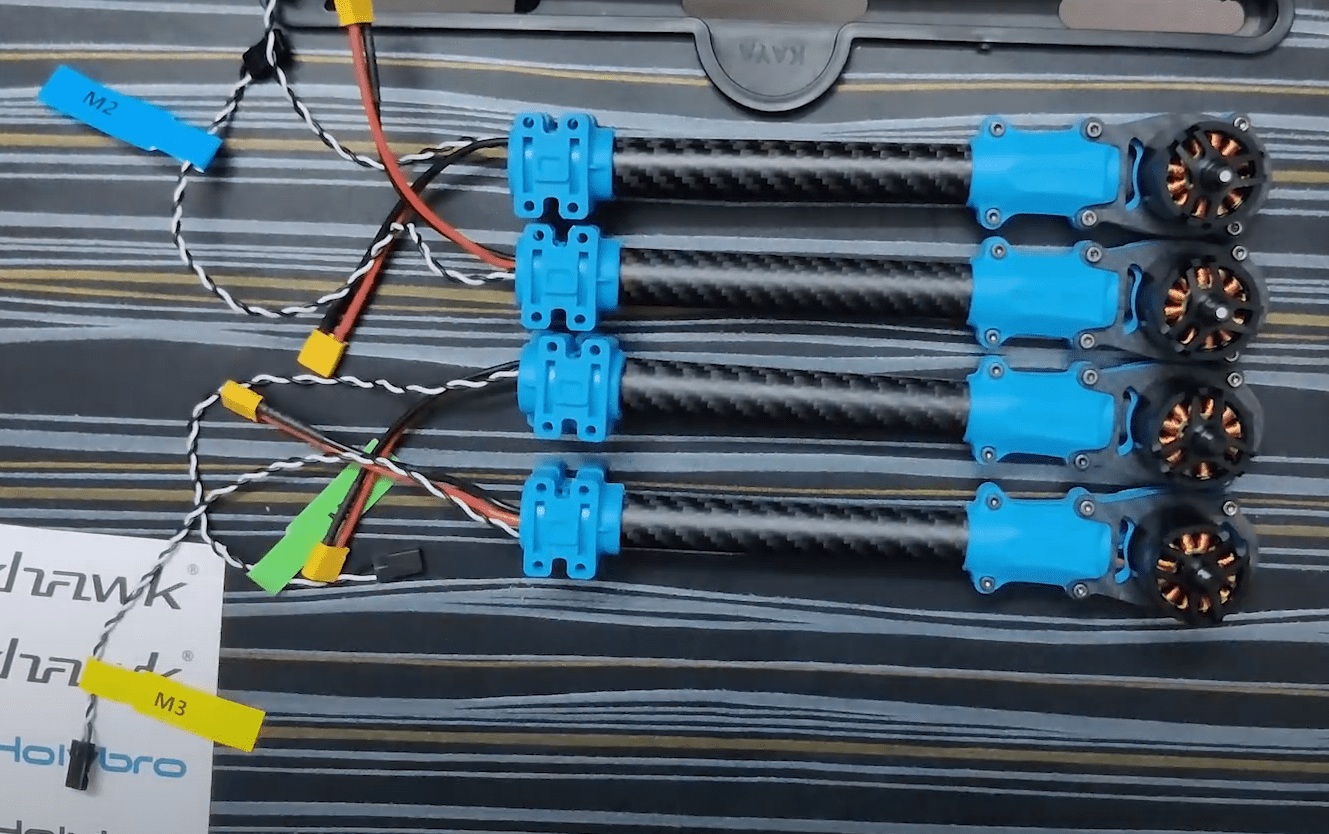
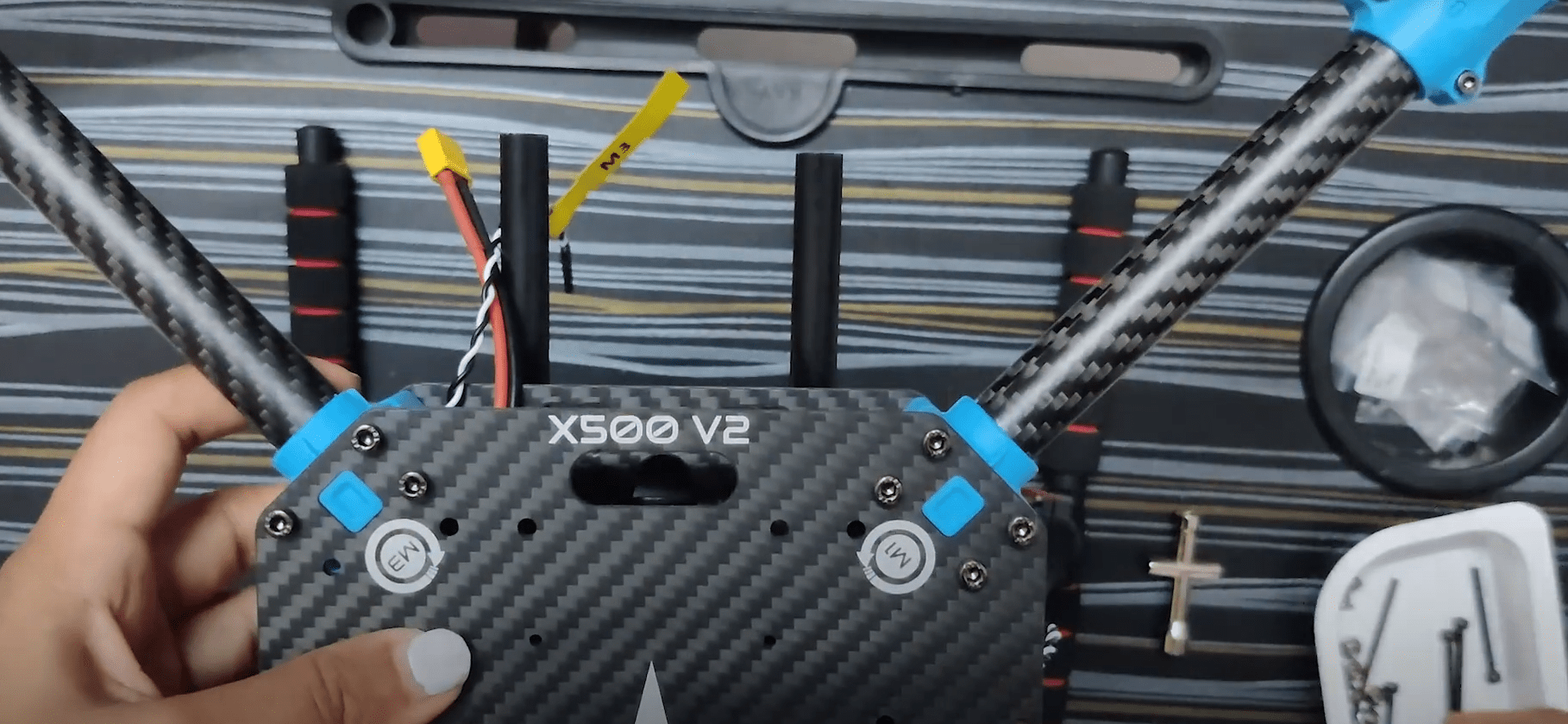
Кронштейн
Screw- Socket Cap Screw M3*38 16pcs | Flange Locknut M3 16pcs
Поставити руки досить просто, оскільки двигуни поставляються вже зібраними.
- Переконайтесь, що у вас є правильна пронумерована рука з мотором на відповідному боці.

TIP
Use your allen keys/ any elongated item and insert it on the opposite side of the bolt that you're trying to fasten.
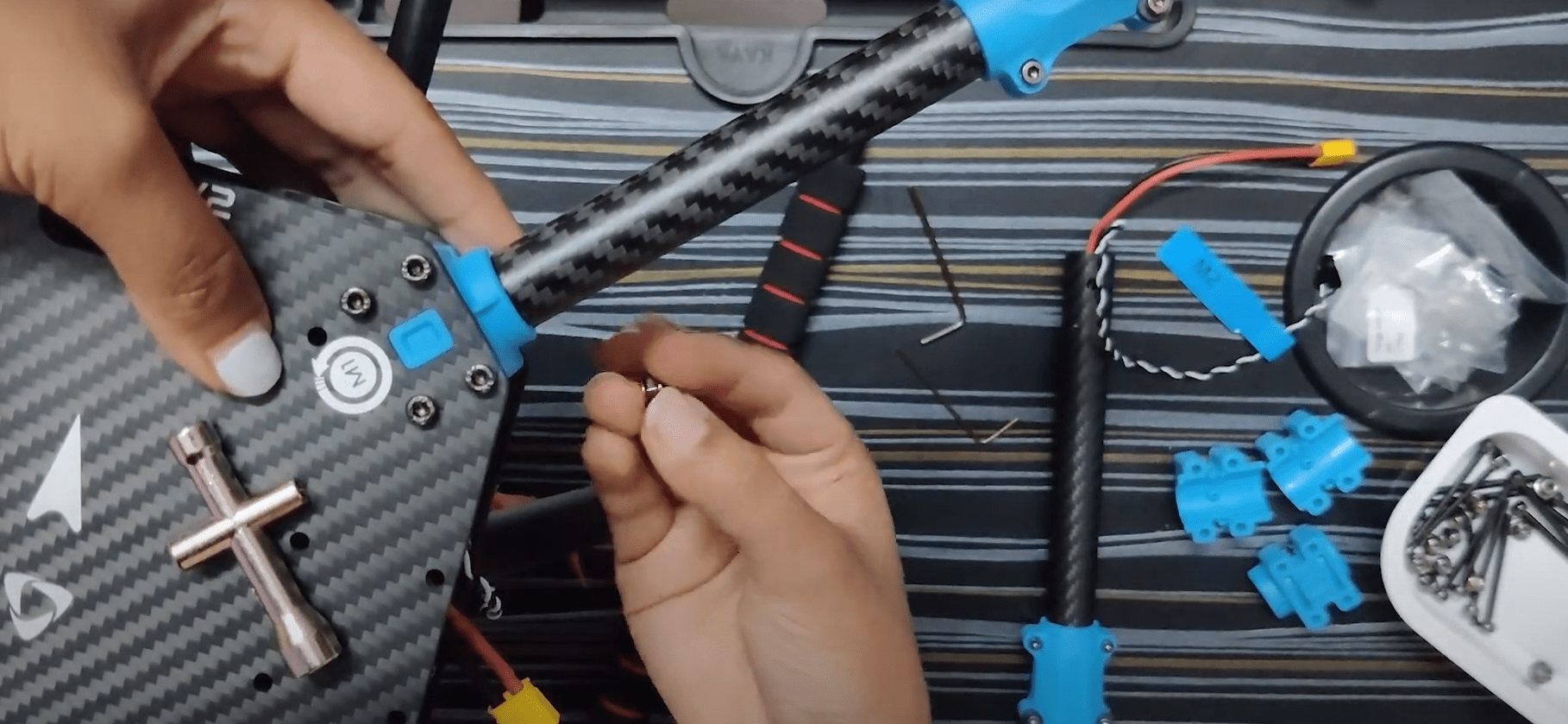
:::
Возьміть одну руку та вставте прямокутний виступ всередину прямокутного порожнини на нижній плиті.
While inserting the top plate on top of this the 3 piece assembly (bottom plate, top plate & arms) have to screwed using Socket Cap Screw M3*38 and Flange Locknut M3.
Утримуйте одну сторону, використовуючи міні-гайковий ключ, який надається у розробницькому комплекті.
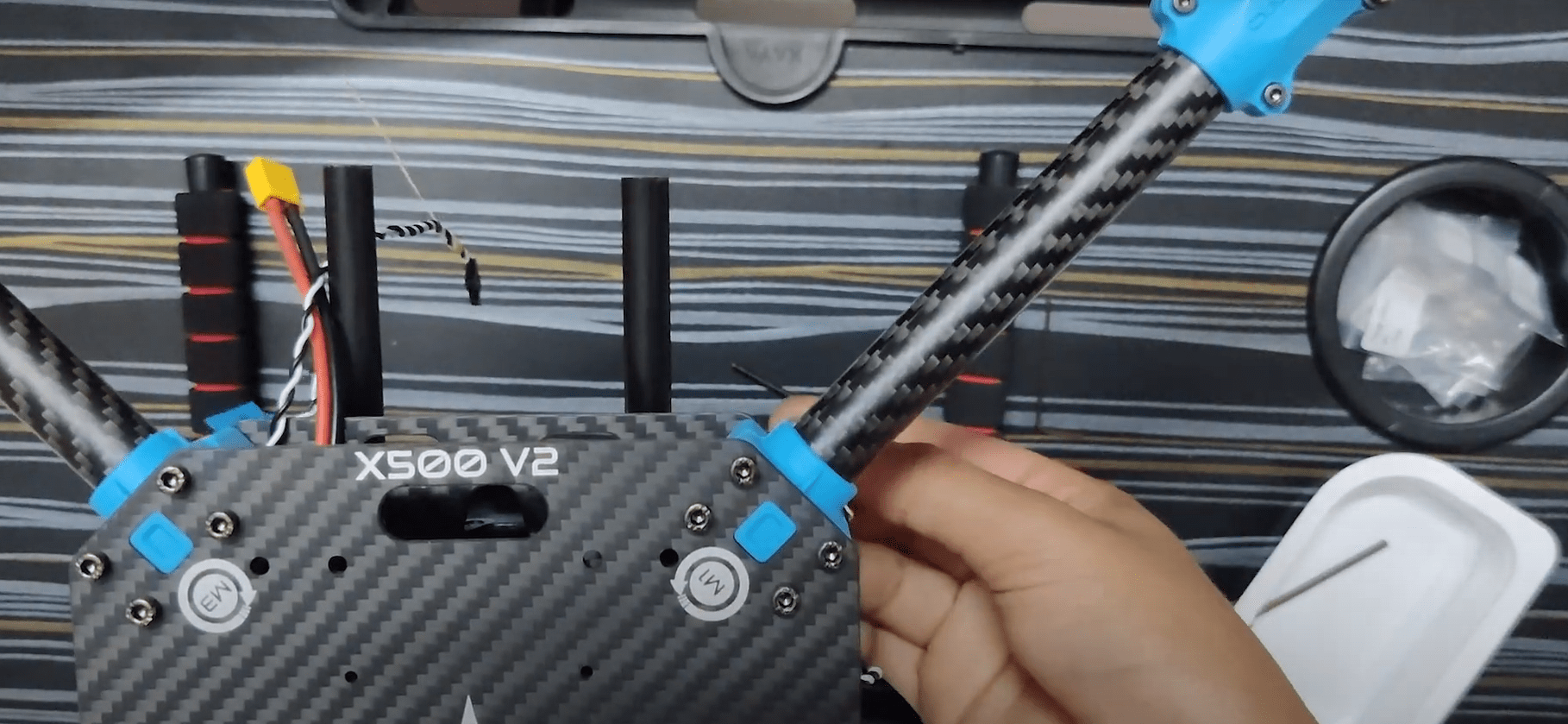
Не зав'язуйте жодних болтів, поки всі 3 мотори не будуть на місці, оскільки це може зробити складним збирання 3-го та 4-го моторів.
Пропелери
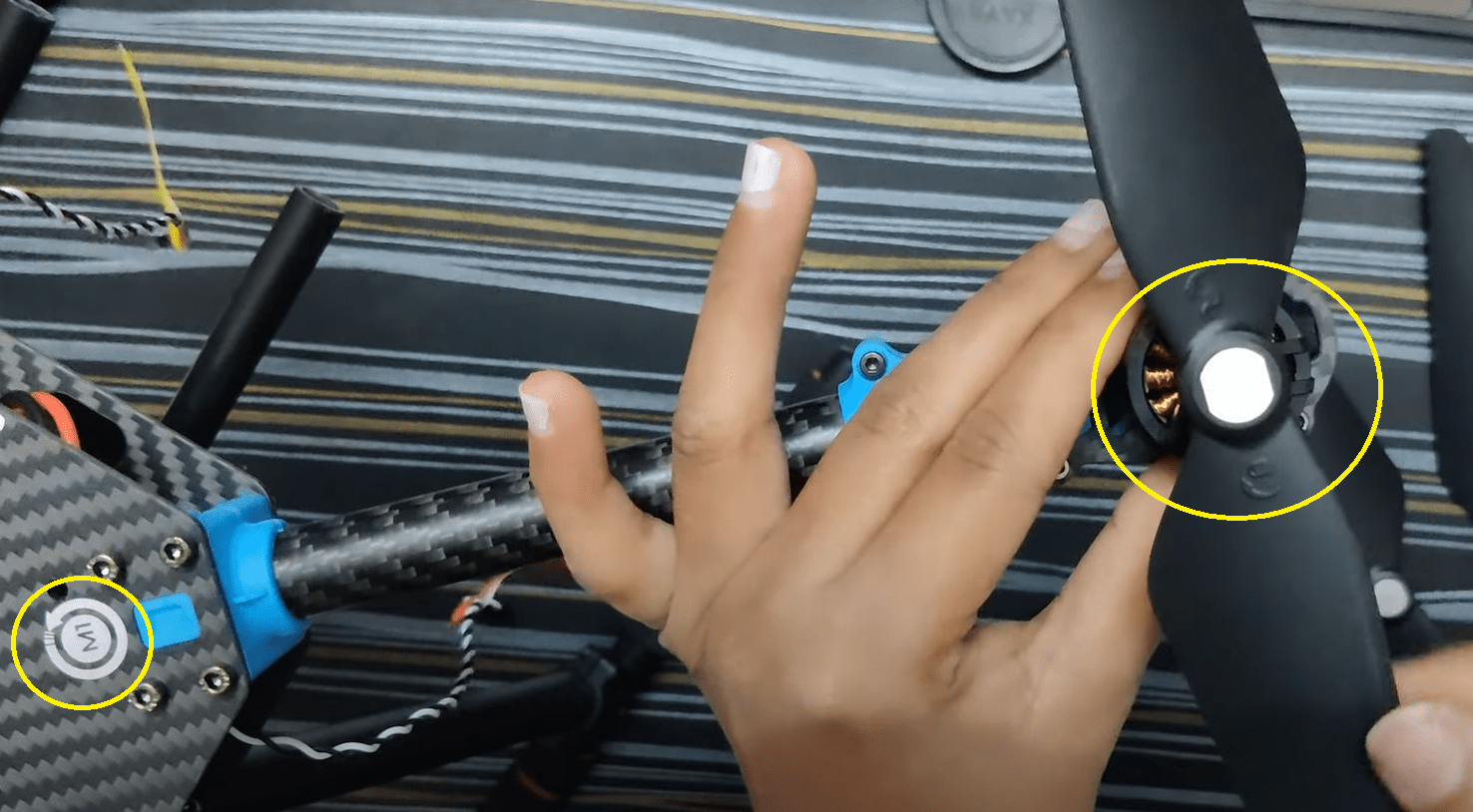
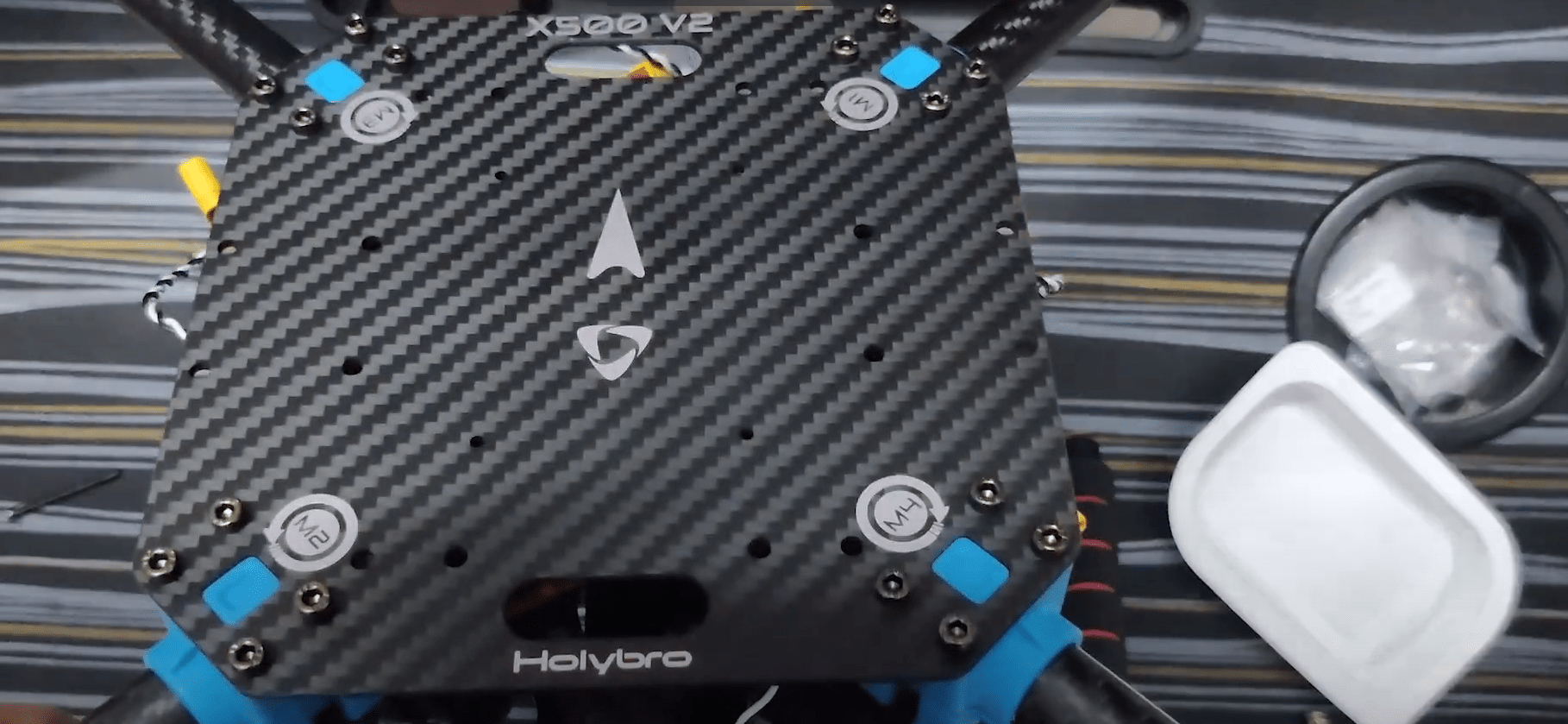
- Нижня пластина вказує напрямок двигуна.
- Пропелери, які мають біле/сріблясте покриття, йдуть на відповідний двигун із подібним покриттям.
- Розблокування та блокування пропелера вказано на самому пропелері.
- Використовуйте 4 пропелери та вставте їх у мотори, пам’ятаючи про 3 пункти вище.
Наступні частини можна розмістити, як завжди.
GPS
Screw- Locknut M3 4 pcs | Screw M3*10 4pcs
Зберіть GPS, дотримуючись відео.
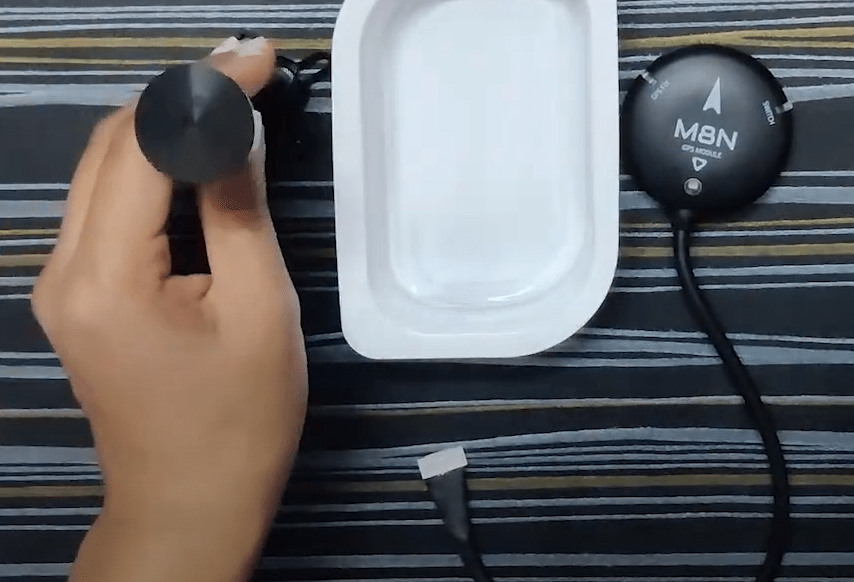
У цьому посібнику використовується місце кріплення GPS, запропоноване в посібнику Holybro.
Screw the GPS mount’s bottom end on the payload holder side using Locknut M3 & Screw M3*10
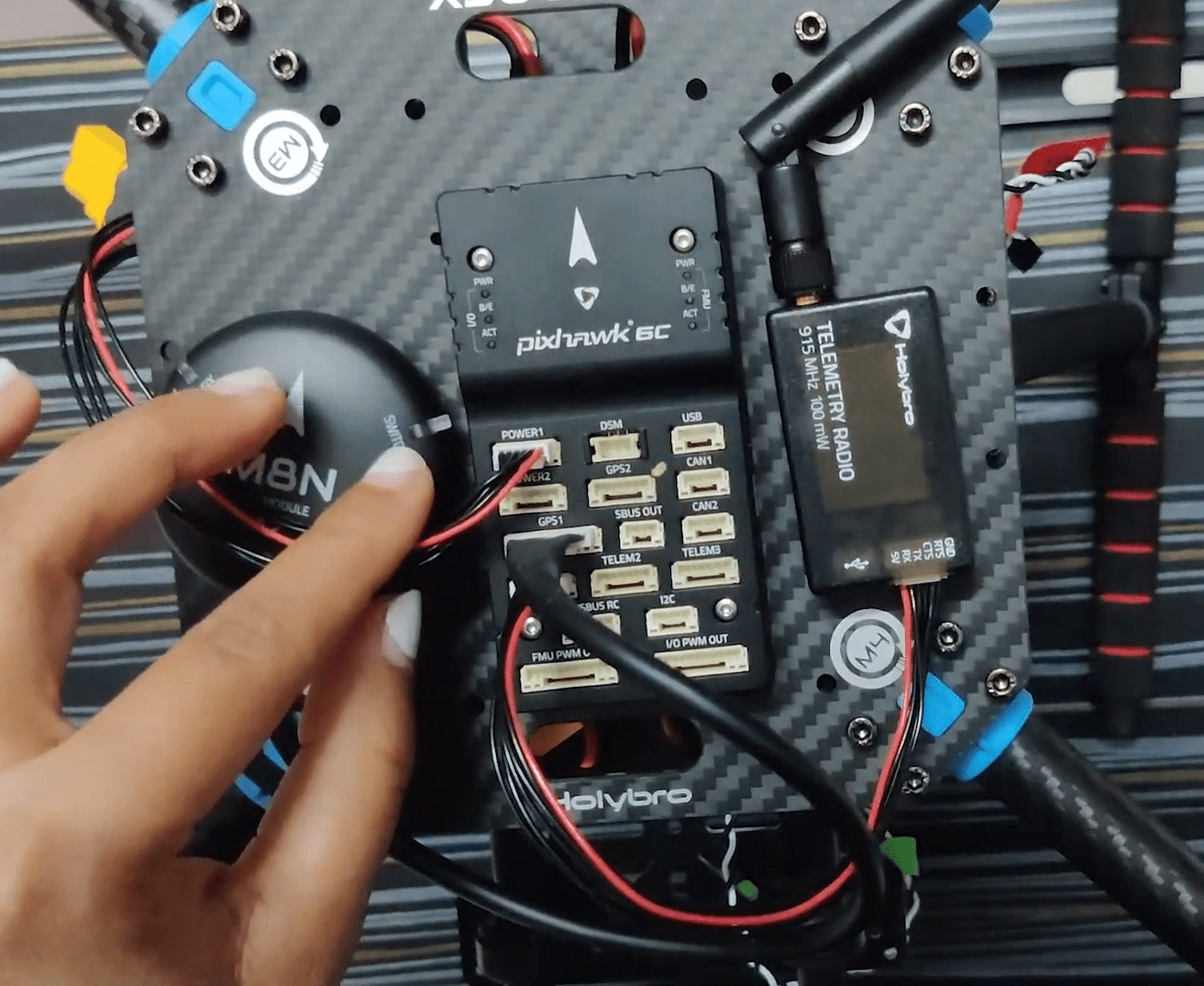
Pixhawk 6C
- Дріт від PM02 йде до POWER1 в Pixhawk
- Телеметрія йде на TELEM1
- GPS до GPS1
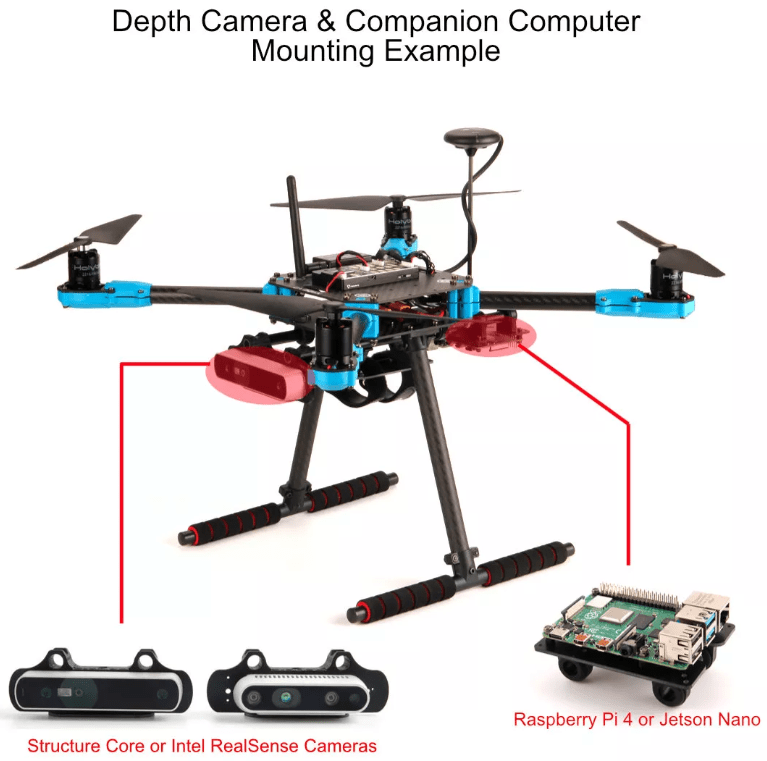
Супутній комп'ютер (необов'язково)
Screw- Socket Cap Screw M2.512 4pcs | Nylon Standoff M2.55 4pcs Locknut M2.5 4pcs
Набір X500 забезпечує місце для супутнього комп'ютера, такого як Raspberry Pi або Jetson nano, що можуть бути розміщені тут [TBD].
- Insert 4 Socket Cap Screw M2.5*12 and put the standoffs on the same.
- Тепер розмістіть супутній комп'ютер і змонтуйте його, використовуючи гайку з фіксацією M2.5
Camera
- Камери, такі як камера глибини / відстеження Intel Realsense або Structure Core, можна встановити за допомогою кріплення для Depth Camera
- Просто вставте кріплення всередину 2-х планок і використовуйте гвинти залежно від камери, яку ви використовуєте.
Встановлення/Налаштування PX4
TIP
Full instructions for installing and configuring PX4 can be found in Basic Configuration.
QGroundControl is used to install the PX4 autopilot and configure/tune it for the X500 frame. Download and install QGroundControl for your platform.
Спочатку оновіть прошивку, конструкцію та відображення актуаторів:
You will need to select the Holybro X500 V2 airframe (Quadrotor x > Holybro 500 V2)
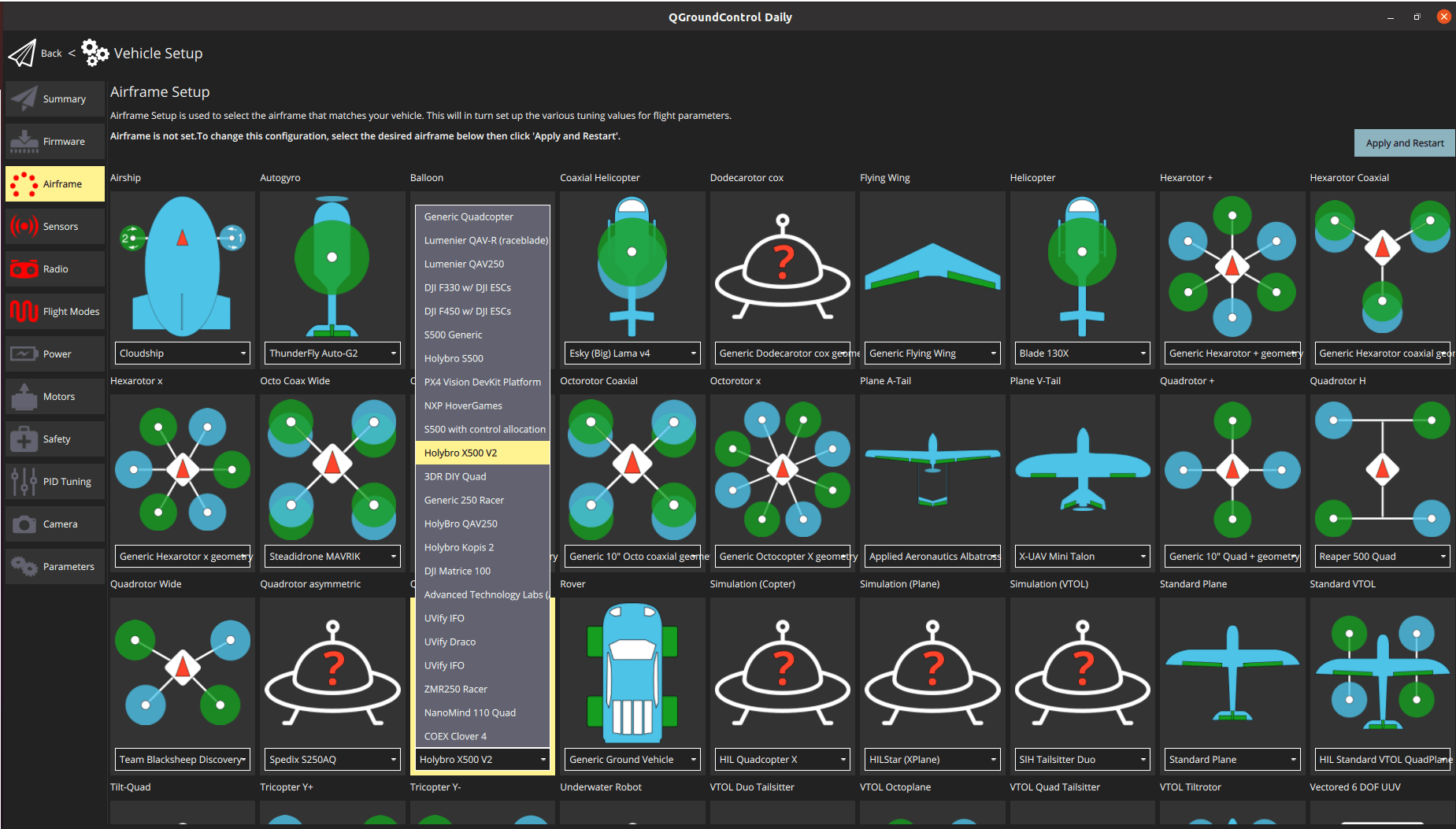
- Вам не потрібно оновлювати геометрію транспортного засобу (оскільки це попередньо налаштована конструкція повітряного каркасу).
- Призначте функції приводу до актуаторів, щоб відповідати вашому підключенню. The airframe is preconfigured with the motors on the FMU PWM Out.
- Перевірте конфігурацію, використовуючи слайдери.
Потім виконайте обов'язкове налаштування / калібрування:
В ідеалі ви також повинні зробити:
Вдосконалення
Airframe selection sets default autopilot parameters for the frame. Ці вистачають для польоту, але це добра ідея налаштувати параметри для конкретної конструкції рами.
For instructions on how, start from Auto-tune.
Подяки
Цей журнал збірки був наданий Акшата та Хамішем Віллі з великими подяками компанії Holybro та Dronecode за апаратне забезпечення та технічну підтримку.