Режим позиції (фіксоване крило)

'%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:.99607843;stroke:none;stroke-width:1.14113545;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='6.615'%20height='6.615'%20x='.702'%20y='290.285'%20rx='.662'%20ry='.688'/%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:.99607843;stroke:none;stroke-width:.28405154;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='2.706'%20height='1.002'%20x='2.656'%20y='289.851'%20rx='.271'%20ry='.104'/%3e%3cellipse%20style='opacity:1;fill:%23000;fill-opacity:1;stroke:none;stroke-width:2.61286139;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20cx='4.009'%20cy='289.8'%20rx='.334'%20ry='.685'/%3e%3ccircle%20style='opacity:1;fill:%23fff;fill-opacity:1;stroke:none;stroke-width:1.71015;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20cx='2.488'%20cy='292.538'%20r='1.235'/%3e%3ccircle%20style='opacity:1;fill:%23fff;fill-opacity:1;stroke:none;stroke-width:1.71015;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20cx='5.594'%20cy='292.538'%20r='1.235'/%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:1;stroke:none;stroke-width:.28370944;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='.529'%20height='.529'%20x='2.223'%20y='292.273'%20rx='0'%20ry='0'/%3e%3crect%20style='opacity:1;fill:%23000;fill-opacity:1;stroke:none;stroke-width:.28370944;stroke-miterlimit:4;stroke-dasharray:none;stroke-opacity:1'%20width='.529'%20height='.529'%20x='5.33'%20y='292.273'%20rx='0'%20ry='0'/%3e%3c/g%3e%3c/svg%3e "Manual/Remote control required")
")
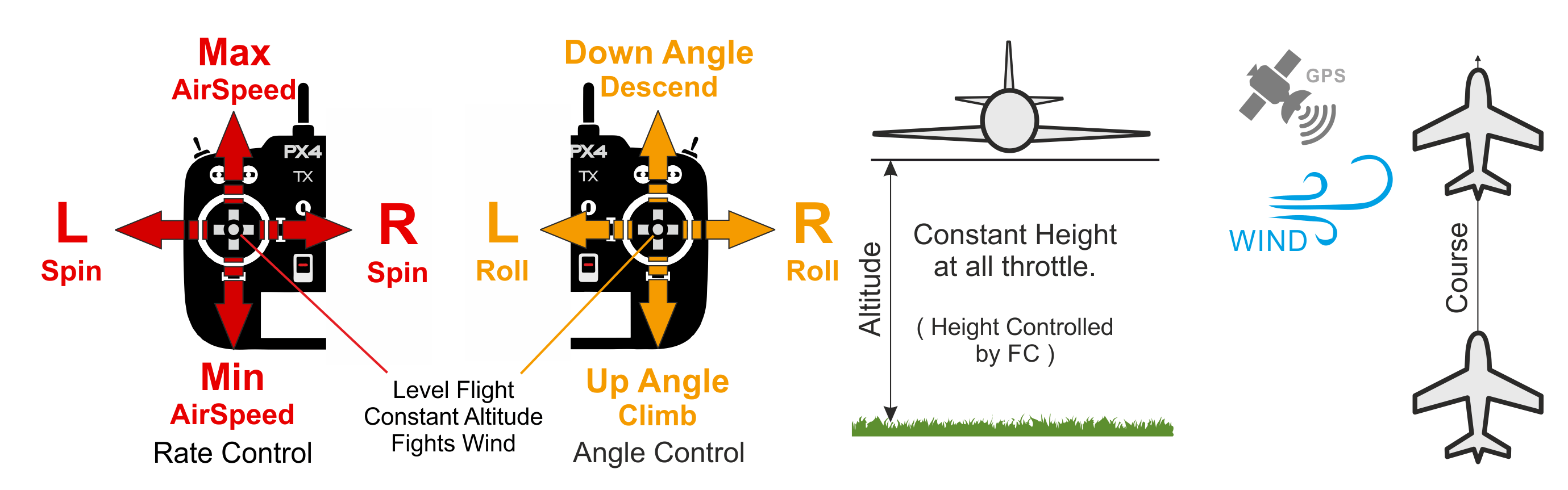
Position mode is the easiest and safest manual mode. Підтримується на транспортних засобах, які мають прогноз позиціонування (наприклад, GPS). Це полегшує пілотам контроль висоти транспортного засобу, і зокрема досягати і підтримувати фіксовану висоту. Режим буде утримувати курс транспортного засобу від вітру. Швидкість активно контролюється, якщо встановлений датчик швидкості.
The vehicle performs a coordinated turn if the roll sticks are non-zero, while the pitch stick controls the rate of ascent/descent. Засувка визначає швидкість повітря — при 50% засувки літак буде утримувати свою поточну висоту з заданою крейсерською швидкістю.
Коли всі стіки управління відпущені/центровані (без крену, тангажу, курсу та близько 50% керування газом), літак повернеться до прямого, рівного польоту та збереже свою поточну висоту та траєкторію польоту не залежно від вітру. This makes it easy to recover from any problems when flying. Крен та тангаж - кутово-керовані (тому неможливо перевалюватися або робити петлю транспортному засобу).
Стік повороту може бути використана для збільшення/зменшення кута приводу автомобіля на поворотах. Якщо контролер фіксований у центрі, то він самостійно здійснює координацію повороту, що означає, що він застосовує необхідну швидкість розвороту для поточного кута крену, щоб виконати плавний поворот. The diagram below shows the mode behaviour visually (for a mode 2 transmitter).
Технічний опис
Position mode is like Stabilized mode but with course stabilization. Швидкість також стабілізується, якщо встановлений датчик швидкості.
- Центровані вхідні показники крену/тангажу/рискання (в межах дедбенду):
- Автопілот рівномірно підтримує транспортний засіб і утримує висоту, швидкість і курс над землею.
- Зовнішній центр:
- Стік регулює висота польоту.
- Резервний стік керує швидкістю літального апарату, якщо підключений датчик швидкості. Without an airspeed sensor the vehicle will fly level at trim throttle (FW_THR_TRIM), increasing or decreasing throttle as needed to climb or descend.
- Стік керування використовує кут крена. Autopilot will maintain coordinated flight.
- Стік крену додає додатковий значення швидкості рискання (додається до розрахованого автопілотом для підтримки координованого польоту). Може бути використаний для ручної зміни кута рискання безпілотного засобу.
- Потрібен ручний ввід управління (наприклад, за допомогою пульта дистанційного керування, джойстика).
- Необхідне джерело вимірювання висоти (зазвичай барометр або GPS)
Параметри
Режим впливає на наступні параметри:
| Parameter | Опис |
|---|---|
| FW_AIRSPD_MIN | Мінімальна швидкість. За замовчуванням: 10 м/с. |
| FW_AIRSPD_MAX | Максимальна швидкість. За замовчуванням: 20 м/с. |
| FW_AIRSPD_TRIM | Крейсерська швидкість. За замовчуванням: 15 м/с. |
| FW_MAN_P_MAX | Установлення максимального кроку в режимі стабілізації кута нахилу. За замовчуванням: 45 градусів. |
| FW_MAN_R_MAX | Максимальне значення крена в режимі стабілізації кута нахилу. За замовчуванням: 45 градусів. |
| FW_T_CLMB_R_SP | Максимальна задана швидкість підйому. За замовчуванням: 3 м/с. |
| FW_T_SINK_R_SP | Максимальне значення зниження швидкості. За замовчуванням: 2 м/с. |
| FW_PN_R_SLEW_MAX | Обмеження швидкості нахилу вихідного значення. За замовчуванням: 90 °/с. |
MAVLink Commands
The following commands are relevant to this mode:
MAV_CMD_DO_CHANGE_SPEED — Sets the cruise airspeed for centred throttle stick.
This requires an airspeed sensor. Only the airspeed speed type is handled (
param1must be0); other speed types are ignored. At centered throttle the vehicle holds the commanded airspeed (param2) if a positive value is set (non-positive values are ignored). The value is constrained between FW_AIRSPD_MIN and FW_AIRSPD_MAX, and defaults to FW_AIRSPD_TRIM if no airspeed has been commanded. Deflecting the throttle stick scales the airspeed towardFW_AIRSPD_MIN(back) orFW_AIRSPD_MAX(forward) around this value. The commanded airspeed resets toFW_AIRSPD_TRIMon every flight mode change.
Note, other commands may be supported.