Побудова Holybro S500 V2 + Pixhawk 4
This topic provides full instructions for building the kit and configuring PX4 using QGroundControl.
INFO
Holybro initially supplied this kit with a Holybro Pixhawk 4, but at time of writing this has been upgraded to a more recent Pixhawk (6C). Цей журнал збірки все ще актуальний, оскільки збірка комплекту практично однакова і, ймовірно, залишиться такою ж, оскільки контролер польоту оновлюється.
Основна Інформація
- Frame: Holybro S500
- Flight controller: Pixhawk 4
- Assembly time (approx.): 90 minutes (45 minutes for frame, 45 minutes for autopilot installation/configuration)

Специфікація матеріалів
The Holybro S500 V2 Kit includes almost all the required components:
- Останній автопілот Pixhawk
- Для цього журналу був використаний Pixhawk 4, але зараз включені набагато більш нові версії.
- Керування живленням PM02 (зібране)
- ARM використовує високоміцні пластмаси
- Двигуни - 2216 KV880 (версія V2)
- Пропелер 1045 (версія V2)
- Pixhawk4 GPS
- Повністю зібрана плата керування живленням з ESC
- 433 MHz / 915 MHz Holybro Telemetry Radio
- Живлення та радіокабелі
- Ремені для акумуляторів
- Dimensions:383385240mm
- Колісна база: 480мм
INFO
No LiPo battery is included. Крім того, ми використовуємо контролер FrSky Taranis.
Апаратне забезпечення(Hardware)
| Опис предмету | Кількість |
|---|---|
| Колісна база: 480мм | 1 |
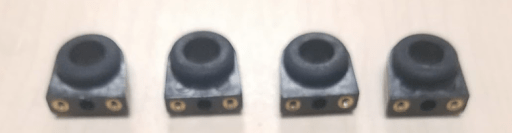
| Кронштейн | 4 |
| Комплект шасі | 2 |
| M3*8 screws | 18 |
| M2 5*6 screws | 24 |
| Ремені для акумуляторів | 1 |
| Пропелер 1045 (версія V2) | 1 |

Набір
| Елементи | Набір |
|---|---|
| Pixhawk 4 | 1 |
| Pixhawk4 GPS MODULE | 1 |
| Плата розгалужувача I2C | 2 |
| Кабель з 6 на 6 контактів (живлення) | 3 |
| Кабель з 4 на 4 контакти (CAN) | 2 |
| Кабель з 6 на 4 контакти (Data) | 1 |
| Кабель з 10 на 10 контакт (PWM) | 2 |
| Кабель з 8 на 8 контактів (AUX) | 1 |
| Кабель з 7 на 7 контактів (SPI) | 1 |
| Кабель з 6 на 6 контактів (Debug) | 1 |
| Кабель виходу PPM/SBUS | 1 |
| Кабель приймача XSR | 1 |
| Кабель приймача DSMX | 1 |
| Кабель приймача SBUS | 1 |
| USB кабель | 1 |
| Складне кріплення для п'єдесталу типу 'X' | 1 |
| 70mm & 140mm carbon rod standoff | 2 |
| 6*3 2.54mm pitch Horizontal Pin | 1 |
| 8*3 2.54mm pitch Horizontal Pin | 2 |
| Набір для піноутворення | 1 |
| Короткий посібник користувача Pixhawk4 | 1 |
| Розведення Pixhawk4 | 1 |
| Короткий посібник з використання GPS | 1 |

Електроніка
| Опис предмету | Кількість |
|---|---|
| Автопілот Pixhawk 4 (PM06 не входить до комплекту) | 1 |
| Управління живленням PM02 (в комплекті) | 1 |
| Двигуни - 2216 KV880 (версія V2) | 4 |
| Pixhawk 4 GPS | 1 |
| Повністю зібрана плата керування живленням з ESC | 1 |
| Телеметричне радіо 433 МГц / Телеметричне радіо 915 МГц | 1 |

Необхідні інструменти
У цій збірці використовуються наступні інструменти:
- Викрутка з шестигранником 1,5 мм
- Викрутка з шестигранником 2,0 мм
- Викрутка з шестигранником 2,5 мм
- Шуруповерт Phillips 3 мм
- Кусачки
- Прецизійний пінцет


Збірка
Оцінкований час для збирання - 90 хвилин, близько 45 хвилин на збірку рами та 45 хвилин на встановлення та налаштування автопілота в QGroundControl.
Збірка шасі. Ми збираємося почати зі складання шасі на вертикальний стовп. Відкрутіть гвинти стійки посадки та вставте вертикальний стовп, як показано нижче.


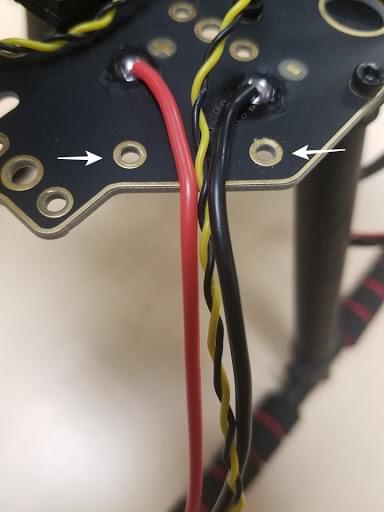
Зібрати плату управління живленням до стільникового шасі. Закрутіть шасі з вертикальним полем на повністю зібрану плату управління живленням.
Дошка має 4 отвори (див. стрілки нижче).

Підключіть за допомогою винтів M3X8, всього 8 штук, по 4 з кожного боку.

Зберігайте зброю на плату керування живленням. Прикріпіть руку до плати управління живленням.

Використовуйте гвинти M2 5X6 по 2 штуки в кожній руці. Вставте гвинти знизу пластини.

Переконайтеся, що кабелі ESC прокладені через середину руки.

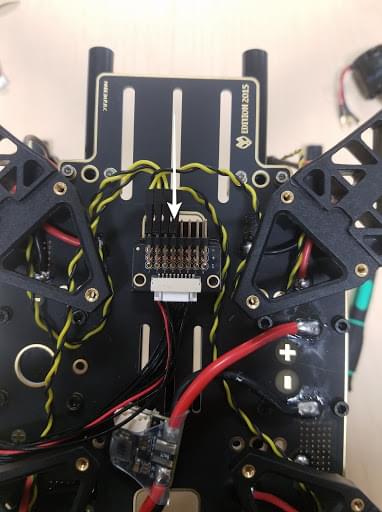
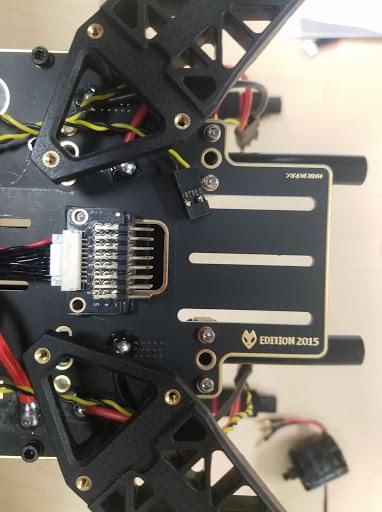
Assemble the 83 2.54mm pitch Horizontal Pin to the 10 to 10 pin cable (PWM) to the Power Management Board. Connect the 10 to 10 pin cable (PWM) to the 83 2.54mm pitch Horizontal Pin.

Виріжте шматок стрічки 3M та прикріпіть його до нижньої частини горизонтального штиря:

Stick the Horizontal Pin to the Power Management Board:
Зберіть двигуни на руки. Для цього нам знадобляться 16 шурупів M3X7, 4 мотори та 4 руки.
Встановіть двигуни в кожну руку, пропустіть гвинт через дно руки:


Після того, як 4 мотори встановлені на руку, візьміть кабелі (червоний, синій, чорний) і пропустіть їх через різьбу руки. 3 кабелі, які мають колірну маркування, підключаються до ESC.


Монтаж GPS на рамці. Для цього нам знадобиться GPS Pixhawk 4 та монтажна плита.

Встановіть мачту GPS на задню частину дошки, використовуйте 4 гвинти:


Використовуйте стрічку та приклейте GPS на верх мачти GPS:

Вставте FrSky на дошку. Наклейте FrSky за допомогою двосторонньої стрічки (3M) на нижню плату. Прикріпіть FrSky до рами:


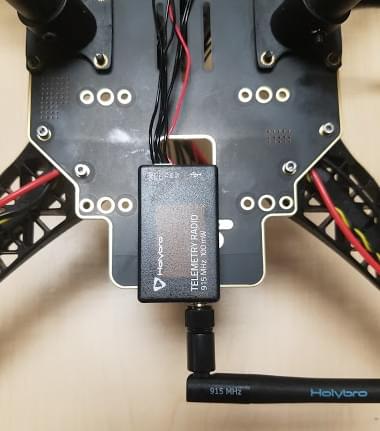
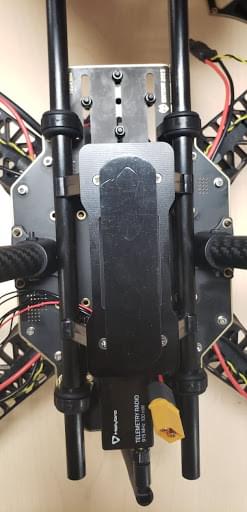
Прикріпіть телеметрію до рами. Наступним кроком є взяти телеметричне радіо Holybro та прикріпити його до рами, використовуйте стрічку 3M.


Цей збірний вузол прикріплений всередину рами, спрямований на зовнішню сторону вперед автомобіля. На нижче наведеному зображенні показано радіо, яке знаходиться всередині нижньої частини рами.
Монтаж Pixhawk 4 на плату. Використовуйте двосторонній скотч для кріплення Pixhawk 4 до центральної пластини:



Наступним кроком є монтаж Pixhawk 4 на плату до рами. Для цього нам знадобляться винти M2 5X6. Вирівняйте пластину з рамою та вставте гвинти. Перед тим як встановлювати плату, ми рекомендуємо накласти стрічку на модуль живлення (таким чином він буде щільно фіксуватися).


Збирання кронштейну батареї до рами. Для цього нам знадобляться винти M2 5X6 та кріплення батареї:

Вставте довгі важі в маленькі кільця:

Додайте це до рами, переконайтеся, що всі чотири сторони вирівняні для вставки гвинтів:
Зберіть маленьку пластину до ніг та відкрутіть по всіх чотирьох сторонах.

Останнім кроком є закріплення плати:
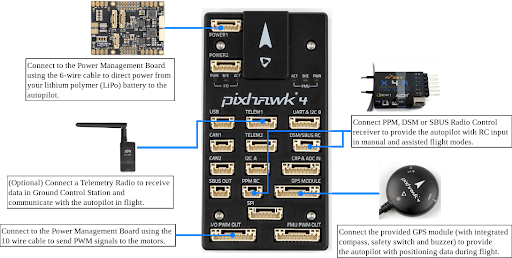
Підключення Pixhawk 4. Pixhawk 4, який має кілька різних дротів та з'єднань з ним. Нижче наведено зображення кожного дроту, який потрібен з Pixhawk, і його вигляд підключення.
Підключіть модуль телеметрії та GPS до контролера польоту, як показано на рисунку 37; підключіть RC приймач, всі 4 ESC до контролера польоту, а також модуль живлення.
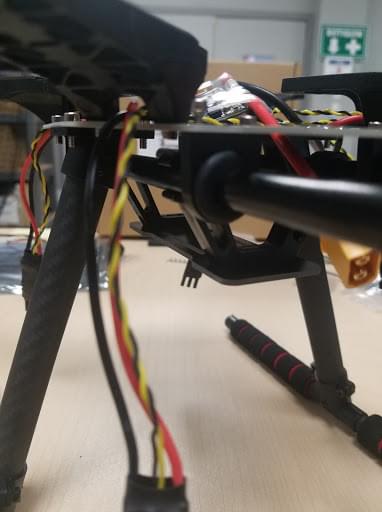
Після повної збірки комплект виглядає як показано нижче:


Конфігурація PX4
QGroundControl is used to install the PX4 autopilot and configure/tune it for the QAV250 frame. Download and install QGroundControl for your platform.
TIP
Full instructions for installing and configuring PX4 can be found in Basic Configuration.
Спочатку оновіть прошивку та конструкцію:
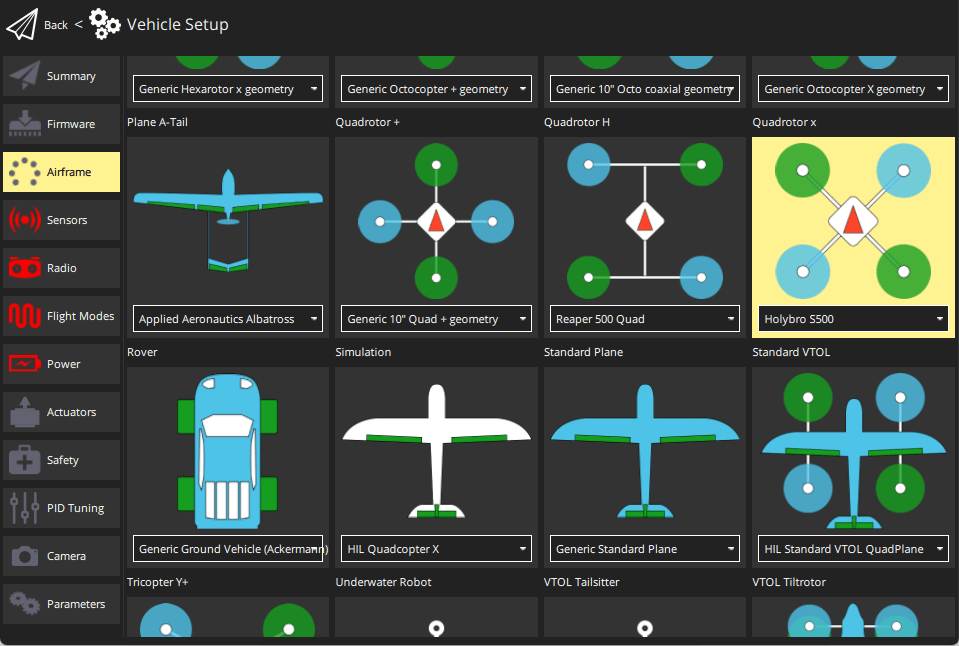
Потім налаштуйте виходи привода:
- Actuators
- Вам не потрібно оновлювати геометрію транспортного засобу (оскільки це попередньо налаштована конструкція повітряного каркасу).
- Призначте функції приводу до актуаторів, щоб відповідати вашому підключенню.
- Перевірте конфігурацію, використовуючи слайдери.
Потім виконайте обов'язкове налаштування / калібрування:
В ідеалі ви також повинні зробити:
Вдосконалення
Airframe selection sets default autopilot parameters for the frame. Ці вистачають для польоту, але це добра ідея налаштувати параметри для конкретної конструкції рами.
For instructions on how, start from Autotune.
Подяки
Цей журнал збірки був наданий Командою тестового польоту Dronecode.