CUAV NEO 3 Pro
PX4 v1.13NEO 3Pro - це приймач GPS DroneCan, вироблений CUAV. Він інтегрує UBLOX M9N, STM32F4 MCU, компас RM3100, триколірний світлодіодний індикатор та вимикач безпеки.

Технічні характеристики
| Апаратне забезпечення(Hardware) | Тип |
|---|---|
| Процесор | STM32F412 |
| Компас | RM3100 |
| Барометр | MS5611 |
| Приймач GNSS | UBLOX NEO M9N |
| RGB привід | NCP5623C |
| Зумер | Пасивний зумер |
| Запобіжний перемикач | Фізична кнопка |
| GNSS | Beidou, Galileo, GLONASS, GPS |
| Система розширення GNSS | SBAS:WAAS,EGNOS,MSAS QZSS:L1s(SAIF) other:RTCM3.3 |
| Кількість одночасних GNSS | 4 |
| Смуга частот | GPS:L1C/A GLONASS:L10F Beidou:B1I Galileo:E1B/C |
| Горизонтальна точність | 2.0M |
| Точність швидкості | 0.05M/S |
| Частота оновлення навігації | 25Hz(Max) |
| Отримання даних | Холодний старт: 24 с Гарячий старт: 2 с Допоміжний старт: 2 с |
| Кількість супутників(MAX) | 32+ |
| Чутливість | Відстеження та нав-167dBm Холодний старт Гарячий старт-148dBm Повторний збір -160dBm |
| Протокол | UAVCAN |
| Тип порту | GHR-04V-S |
| Підтримувані автопілоти включають | серія CUAV, серія Pixahwk |
| Фільтрування хвиль | SAW+LNA+SAW |
| Протиелектромагнітний/радіочастотний перешкід | EMI+RFI |
| Оновлення прошивки | підтримка |
| Вхідна напруга | 5V |
| Робоча температура | -10~70℃ |
| Розмір | 606016MM |
| Вага | 33g |
Де купити
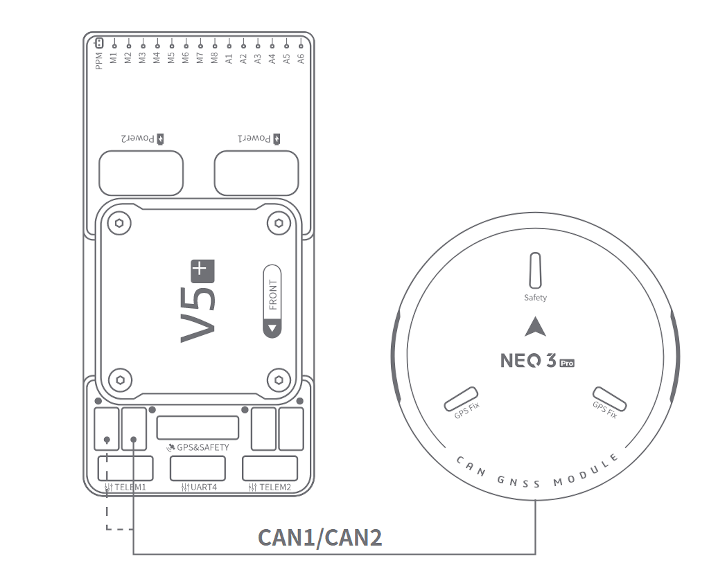
Підключення та з'єднання
NEO 3 Pro, підключений до інтерфейсу автопілоту CAN1/CAN2
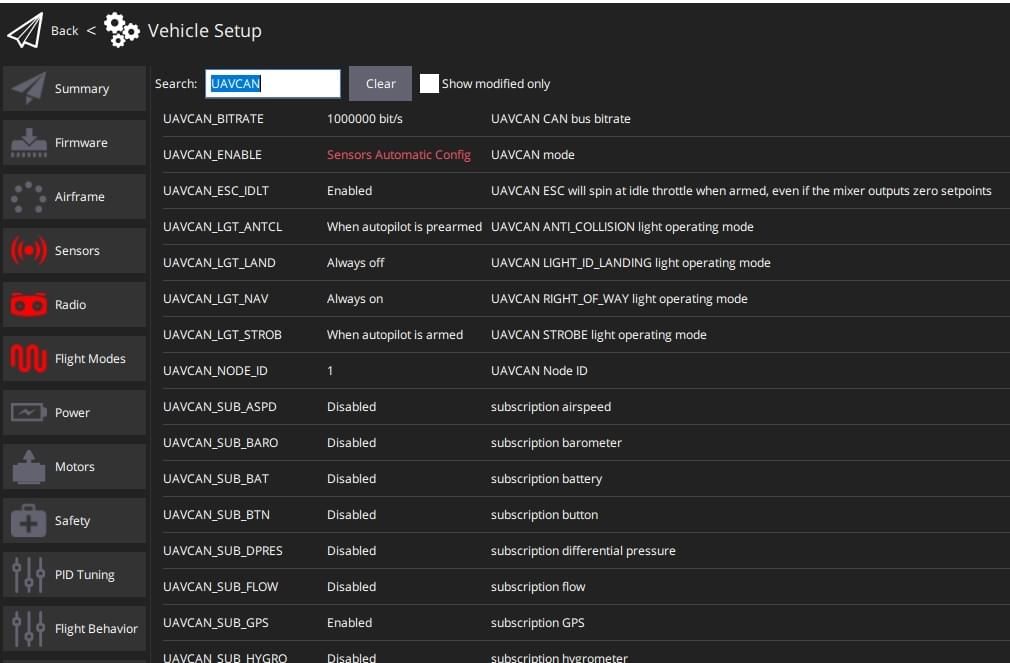
Конфігурація PX4
Відкрийте QGroundControl > Parameters та змініть наступні параметри:
UAVCAN_ENABLE: встановити наSensors Automatic config.UAVCAN_SUB_GPSВстановлено наУвімкнути.