mRo-X2.1 Autopilot (Discontinued)
DiscontinuedWARNING
This flight controller has been discontinued and is no longer commercially available.
WARNING
PX4 не розробляє цей (або будь-який інший) автопілот. Contact the manufacturer for hardware support or compliance issues.
The mRo-X2.1 autopilot is based on the Pixhawk®-project FMUv2 open hardware design. It runs PX4 on the NuttX OS.

INFO
This flight controller is manufacturer supported.
Короткий опис
- Main System-on-Chip: STM32F427
- CPU: STM32F427VIT6 ARM® мікроконтроллер - Revision 3
- ІО: мікроконтролер STM32F100C8T6 ARM®
- Датчики:
- Invensense® MPU9250 9DOF
- Invensense ICM-20602 6DOF
- MEAS MS5611 барометр
- Розміри/Вага
- Size: 36mm x 50mm (Can be ordered with vertical, horizontal or no headers installed)
- Точки кріплення: 30,5 мм х 30,5 мм діаметр 3,2 мм
- Вага: 10.9g
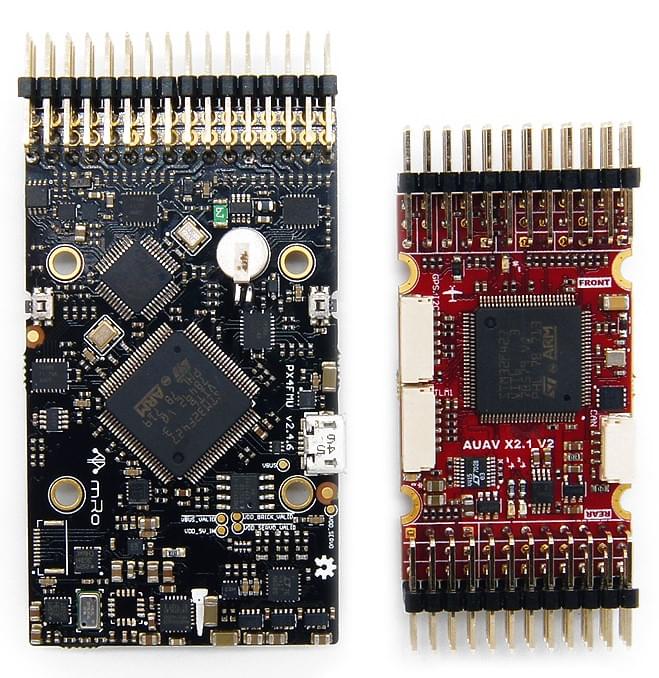
Діаграма нижче надає порівняльний аналіз з Pixhawk 1. mRo має практично ідентичне апаратне забезпечення й підключення, але має значно менший слід. Основні відмінності - це оновлені датчики та Rev 3 FMU.
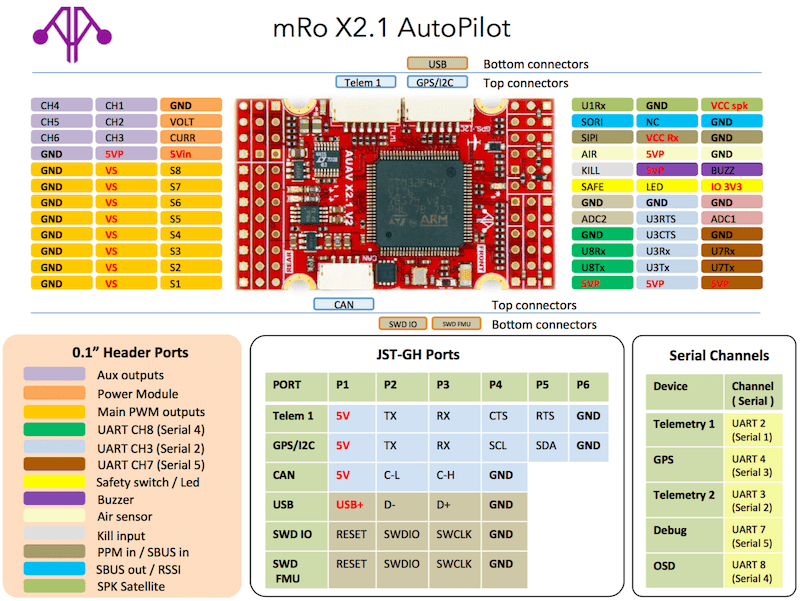
Підключення
- 2.54 мм заголовки:
- GPS (UART4) з I2C
- CAN шина
- Вхід RC
- PPM вхід
- Вхідний спектр
- RSSI вхід
- вхід SBUS
- sBus вихід
- Вхід живлення
- Вихід зумера
- Вихід світлодіода
- 8 x Виводи сервоприводів
- 6 x Aux outputs
- Позабортовий конектор microUSB
- Kill Pin output (Currently not supported by firmware)
- AirSpeed Sensor
- USART2 (Telem 1)
- USART3 (Telem 2)
- UART7 (Console)
- UART8 (OSD)
Проблема PX4 BootLoader
За замовчуванням mRo X2.1 може бути попередньо налаштований на ArduPilot®, а не на PX4. Це можна побачити під час оновлення прошивки, коли плата визнається як FMUv2 замість X2.1.
In this case you must update the BootLoader using BL_Update_X21.zip. Якщо це виправлення не буде зроблено, ваша пеленга буде відображена неправильно і надмірний інерціальний модуль не буде виявлено.
Основні кроки:
- Download and extract BL_Update_X21.zip.
- Find the folder BL_Update_X21. This contains a bin file and a subfolder named /etc containing an rc.txt file
- Скопіюйте ці файли на кореневий каталог вашої micro SD-карти та вставте її в mRO x2.1
- Увімкніть mRO x2.1. Зачекайте, доки він завантажиться, а потім перезавантажте 1 раз.
Доступність
This product can be ordered at the mRobotics® Store.
Посібник з підключення
Збірка прошивки
TIP
Most users will not need to build this firmware! It is pre-built and automatically installed by QGroundControl when appropriate hardware is connected.
To build PX4 for this target:
make mro_x21_defaultКреслення
The board is documented on the mRo hardware repo: x21_V2_schematic.pdf.
Налаштування послідовного порту
| UART | Пристрій | Порт |
|---|---|---|
| USART1 | /dev/ttyS0 | IO debug |
| USART2 | /dev/ttyS1 | SERIAL1 |
| USART3 | /dev/ttyS2 | TELEM2 |
| UART4 | /dev/ttyS3 | GPS/I2C |
| USART6 | /dev/ttyS4 | PX4IO |
| UART7 | /dev/ttyS5 | SERIAL5 CONSOLE |
| UART8 | /dev/ttyS6 | SERIAL4 |